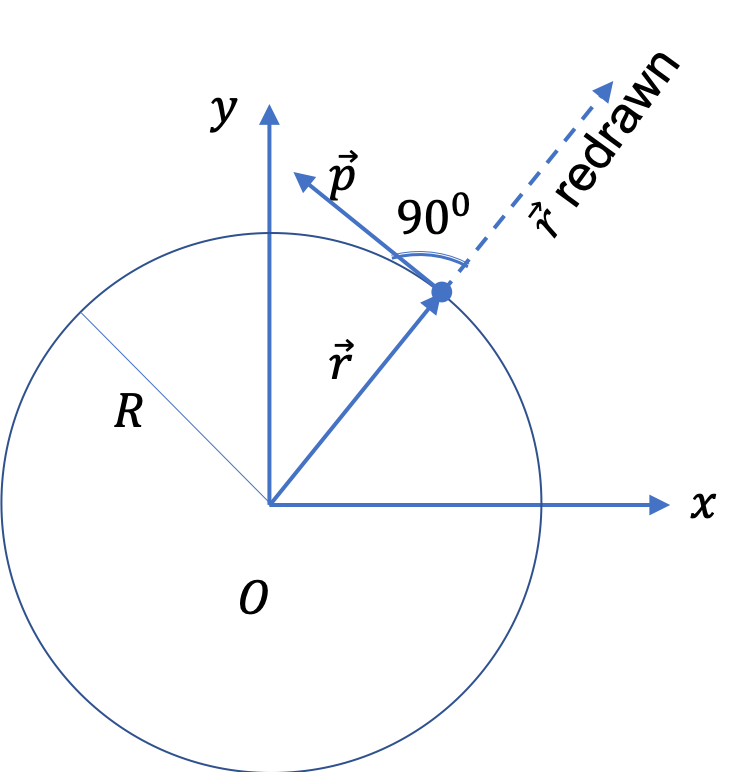
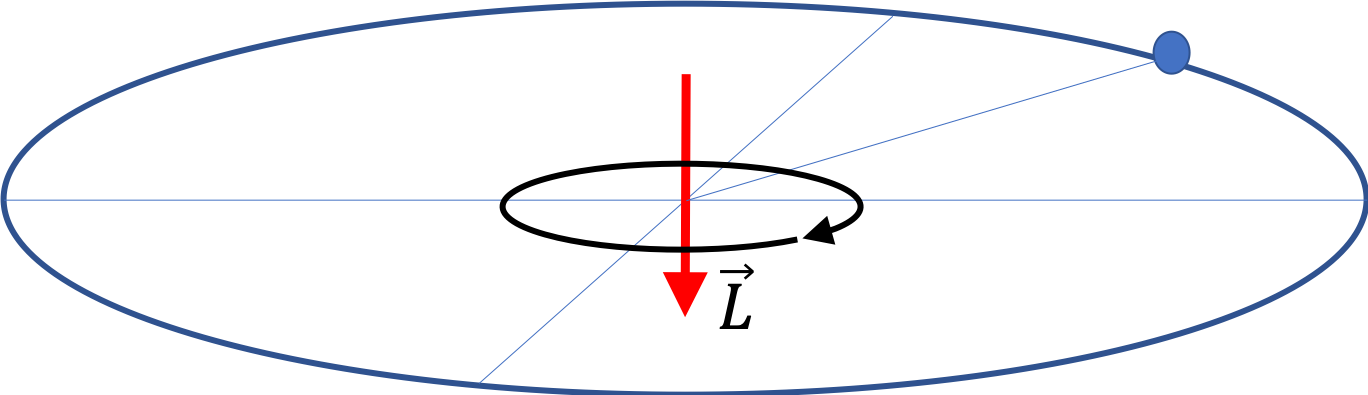
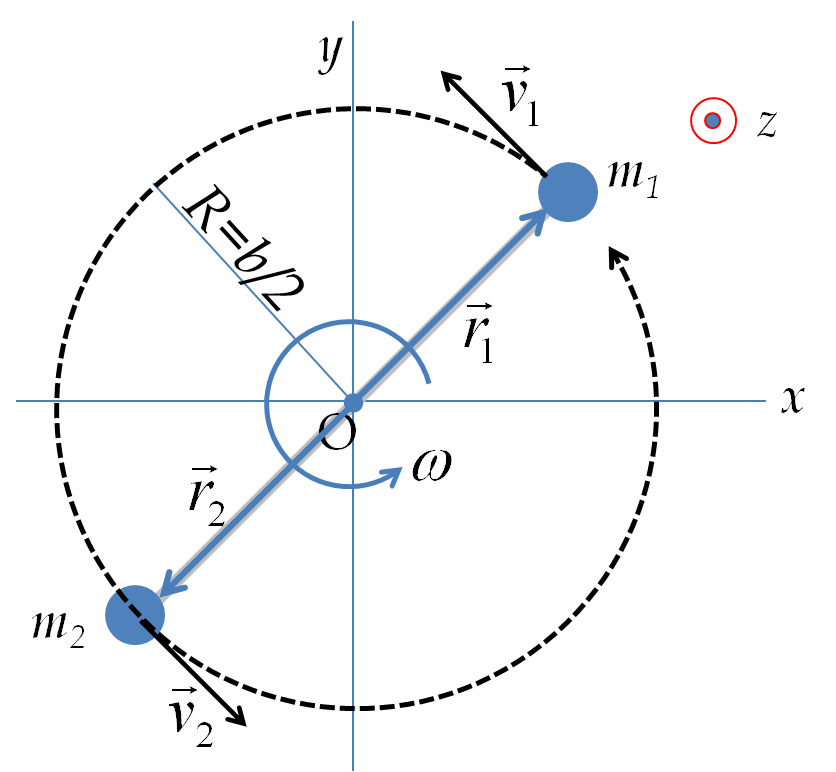
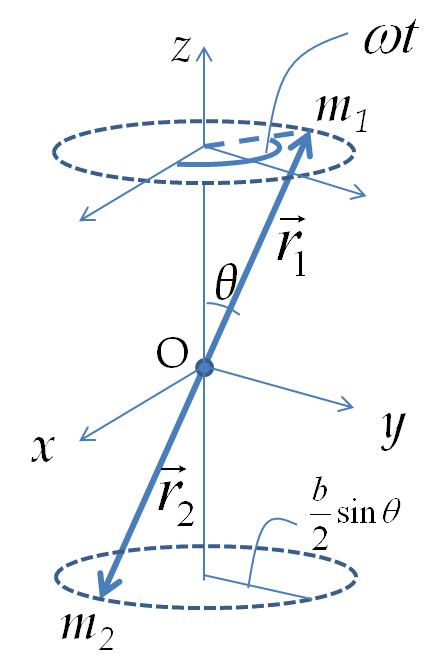
We can also think of the circular motion in
Figure 9.38 as rotation about
\(z\)-axis by quantifying the rotation by angle
\(\theta\) subtended by the radial line to the particle with positive
\(x\)-axis. The distance
\(s\) covered on the arc of the circle will be related with angle covered
\(\theta\) by arc-angle relation.
\begin{equation*}
s = R \theta.
\end{equation*}
The rate of change in arc distance \(s \) is the speed \(v \) and rate of change of \(\theta\) is the angular speed \(\omega\text{.}\) Therefore,
\begin{equation*}
v = R \omega.
\end{equation*}
Substituting in Eq.
(9.20) we get another useful expression for angular momentum.
\begin{equation}
l = m R^2 \omega.\tag{9.21}
\end{equation}
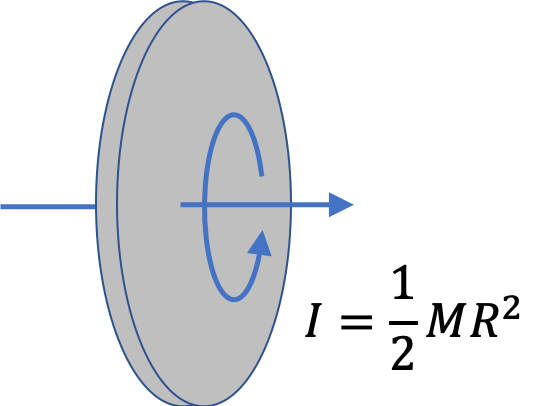
The quantity \(m R^2\) in this formula is called moment of inertia of the particle about the axis. It is denoted by letter \(I \text{.}\)
\begin{equation}
I\, (\text{of a particle at a distance }R \text{ from axis}) = m R^2.\tag{9.22}
\end{equation}
In terms of moment of inertia and the angular velocity, the formula for the magnitude of the angular momentum for a particle moving in a circle takes a really simple form
\begin{equation}
l = I\,\omega.\tag{9.23}
\end{equation}
If you want to be more complete in your description, you could include information about the axis of rotation. For \(z\)-axis, this equation would be \(l_z = I_{zz}\,\omega_z\text{.}\) The two subscripts for moment of inertia will become clear when we discuss moments of inertia of more complicated systems.