Example 9.97. Angular Acceleration of a Pulley.
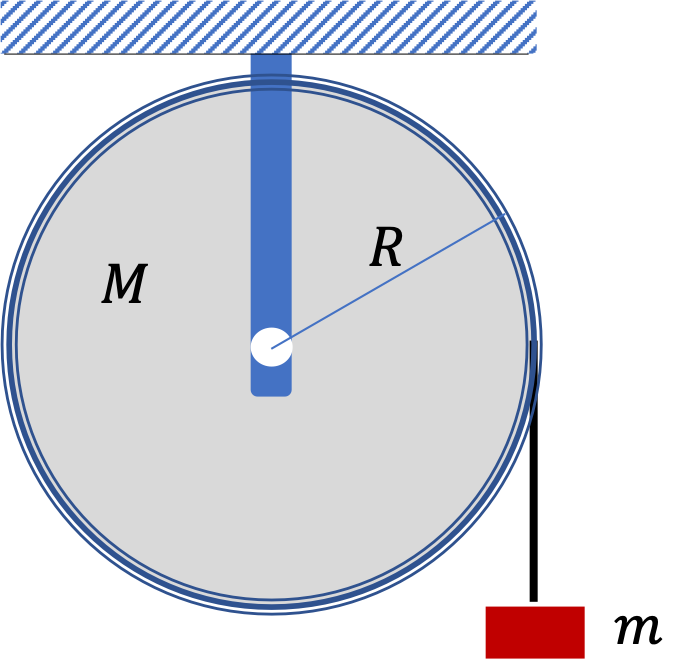
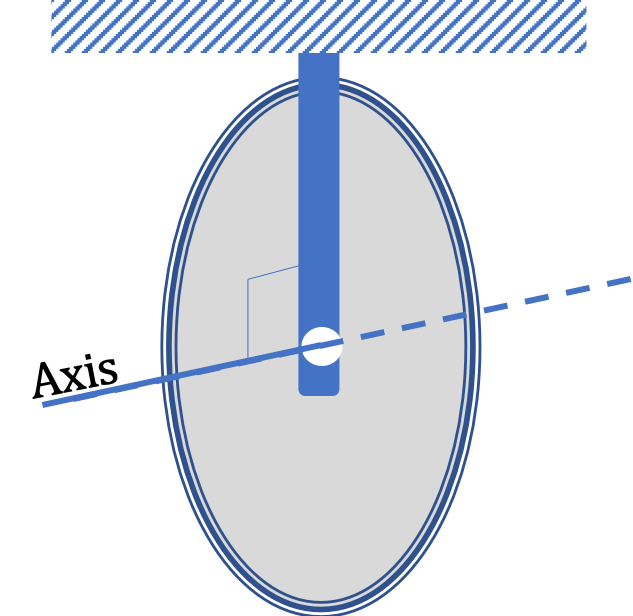
A \(20\text{-kg}\) pulley of radius \(10\text{ cm}\) has a rope wound around its edge. When the rope is pulled with some force the pulley begins to rotate. (a) Where is the axis of rotation in this problem? (b) Is the axis of rotation fixed in time?
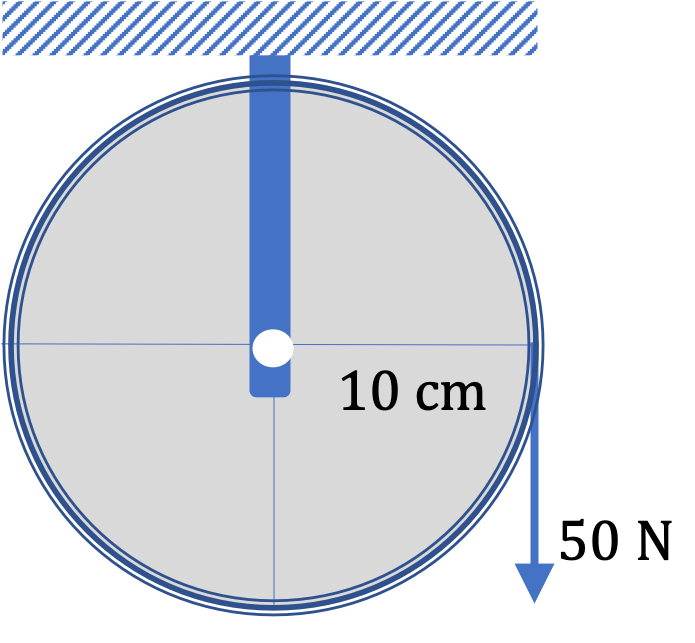
(c) Is the rotating body a rigid body? (d) What will be the angular acceleration of the pulley when the force in the rope is \(50\text{ N}\) down as shown in the figure.
Answer.
(a) Through the center and perpendicular to the surface of the pulley, (b) Yes, fixed, (c) With the mass of the rope negligible, the pulley+rope wound around it is a rigid body, (d) \(50\text{ rad/sec}^2\text{,}\) clockwise or towards into-the-page.
Solution 1. a
The axis of rotation is the imaginary line that passes through the center of the pulley and is perpendicular to the disk of the pulley.
Solution 2. b
Yes, the axis is fixed.
Solution 3. c
The pulley is the rotating body. The rope on eht pulley is also rotating. So, in a sense, the rotating body is losing some of its mass. But, we will assume that mass of the rope is negligible. With that assumption, the roating body is a rigid body.
Solution 4. d
Magnitude:
Since we have a rigid body rotating about a fixed axis, we can use
\begin{equation*}
I\alpha = \mathcal{T}_{\text{net}}.
\end{equation*}
Here, \(I \) is the moment of inertia of the pulley, which we can consider to be a disk.
\begin{equation*}
I = \dfrac{1}{2}\, MR^2.
\end{equation*}
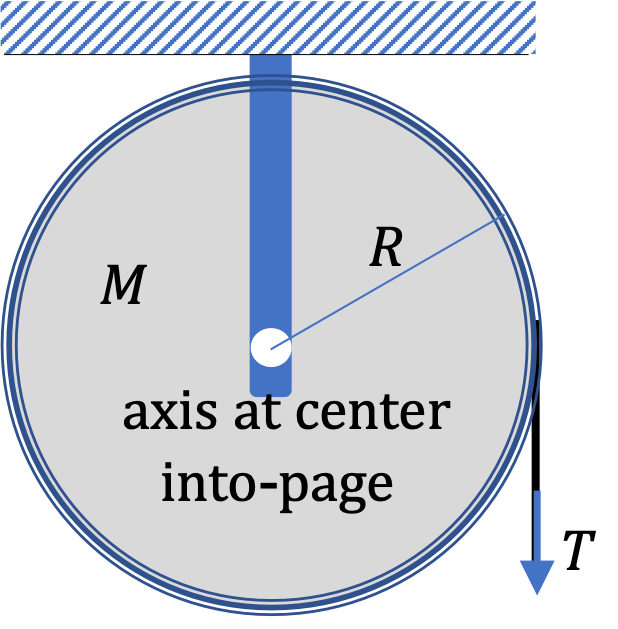
By drawing a diagram, you can convince yourself that the lever arm of the tension force is just the radius of the pully. Therefore
\begin{equation*}
\mathcal{T}_{T} = R T.
\end{equation*}
Lines of other forces on the pulley pass through the axis, therefore, their lever arms are zero. This gives us the net toque to be
\begin{equation*}
\mathcal{T}_{\text{net}} = RT.
\end{equation*}
Therefore, the angular acceleration is
\begin{equation*}
\alpha = \dfrac{\mathcal{T}_{\text{net}}}{I} = \dfrac{ 2T}{MR} = \dfrac{ 2\times 50}{20\times 0.10} = 50\text{ rad/sec}^2.
\end{equation*}
Direction:
The direction of the net torque is into-the-page, which is the same as negative \(z \) axis or the clockwise rotation. This is the same direction for the angular acceleration.