

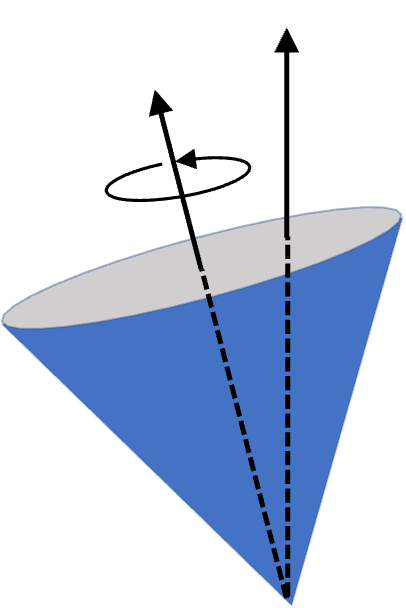
Example 10.46. Precession of a Spinning Top.
A conical shaped top with mass \(0.40\text{ kg}\text{,}\) height \(5\text{ cm}\text{,}\) and angle at tip \(45^\circ\) is spinning at \(25\text{ rev/sec}\) at angle of \(10^\circ\) with respect to the vertical. (a) What is the rate of precession? (b) What is the direction of precession when looked from above? Moment of inertia of a cone \(\frac{3}{10}MR^2\text{.}\)
Answer.
(a) \(1.93\text{ rev/sec}\text{,}\) (b) counterclockwise sense.
Solution.
(a) We notice that spinning top is just like a gyroscope. From the precession rate formula for the gyroscope, we get
\begin{equation*}
\Omega = \frac{mgl}{I_0\omega}.
\end{equation*}
In the present case, we have the following values
\begin{align*}
m \amp = 0.40\text{ kg},\ \ g = 9.81\text{ m/s}^2,\ \ l = 2.5\text{ cm} = 0.025\text{ m}, \\
I_0 \amp = \frac{3}{10}MR^2 = \frac{3}{10}\times 0.4\text{ kg} \times (0.05\text{ m}\times \tan(22.5^\circ))^2 \\
\amp = 5.147\times 10^{-5}\text{ kg m}^2 \\
\omega \amp = 25\text{ rev/sec} = 25\times 2\pi \text{ rad/sec}.
\end{align*}
We get
\begin{equation*}
\Omega = 12.1\text{ rad/sec} = \frac{12.1}{2\pi}\text{ rev/sec} = 1.93\text{ rev/sec}.
\end{equation*}
(b) When we look at the precessiing top from above, we will find the precession in the direction of the torque by weight. By using right hand rule on \(\vec r\times \vec F\) on frce of weight at center of mass, we get counterclockwise sense.


