Remark 7.58. Recap:.
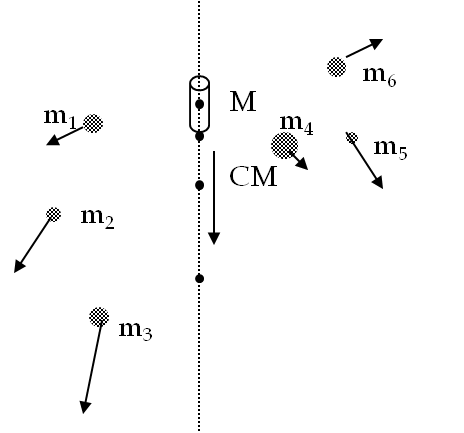
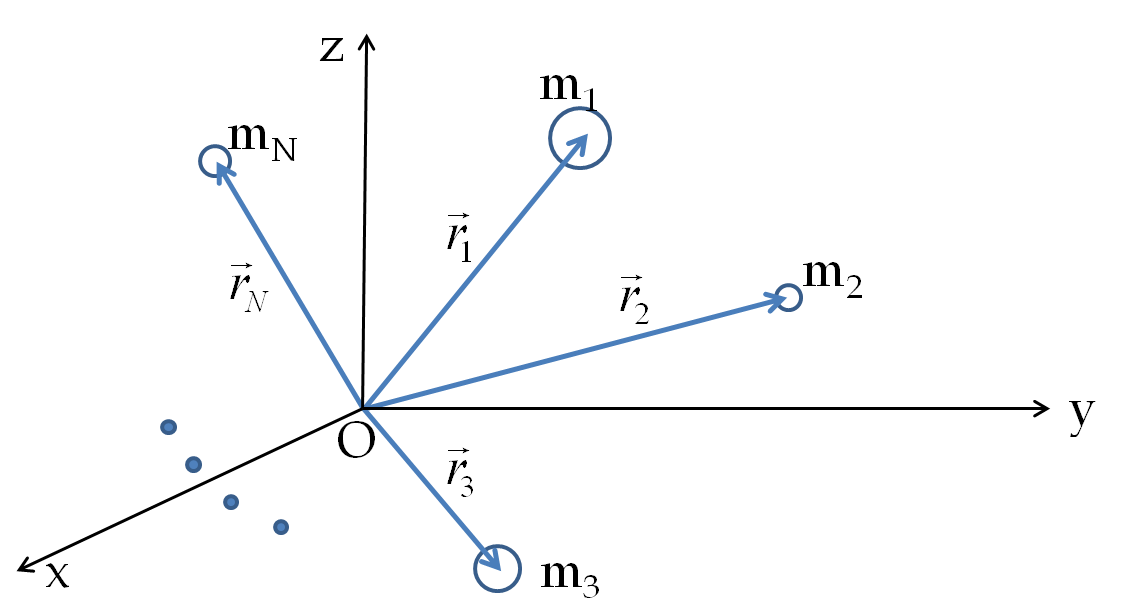
Center of mass of an object provides an important way to follow the overall motion of the object. We have already seen the formula for the position of the center of mass. For a body that is a collection of discrete masses \(m_1\) at \(\vec r_1\text{,}\) \(m_2\) at \(\vec r_2\text{,}\) \(\cdots\text{,}\) \(m_N\) at \(\vec r_N\text{,}\) the center of mass will be at \(\vec R_\text{CM}\text{,}\) given by
\begin{equation}
\vec R_\text{CM} = \frac{1}{M}\left( m_1\vec r_1 + m_2\vec r_2 + \cdots + m_N\vec r_N \right),\tag{7.57}
\end{equation}
where total mass \(M=m_1+m_2+\cdots+m_N\) and \(\vec r_i\) actually refer to the center of mass of the \(i^\text{th}\) part. Now, studying the rate at which the center of mass \(\vec R_\text{CM}\) changes will give us the velocity of center of mass, \(\vec V_{\text{CM}}\text{.}\) Taking a time derivate of both sides, it is immedeiately clear that
\begin{equation}
\vec V_{\text{CM}}\equiv \frac{d \vec R_\text{CM}}{dt} = \dfrac{m_1\vec v_1 + m_2\vec v_2 + \cdots + m_N\vec v_N }{M}.\tag{7.58}
\end{equation}
Similarly, when we look at the rate which \(\vec V_{\text{CM}}\) changes, we get the acceleration of the center of mass, \(\vec A_{\text{CM}}\text{.}\) By taking one more derivative gives
\begin{equation}
\vec A_{\text{CM}}\equiv \frac{d \vec V_\text{CM}}{dt} = \dfrac{m_1\vec a_1 + m_2\vec a_2 + \cdots + m_N\vec a_N }{M}. \tag{7.59}
\end{equation}
The total momentum of all particles will be
\begin{equation*}
\vec p_\text{total} = m_1\vec v_1 + m_2\vec v_2 + \cdots + m_N\vec v_N.
\end{equation*}
Now, this is just \(M \vec V_{\text{CM}}\) as you can see from Eq. (7.58) when you multiply it by \(M\text{.}\)
\begin{equation*}
M \vec V_{\text{CM}} = m_1\vec v_1 + m_2\vec v_2 + \cdots + m_N\vec v_N
\end{equation*}
We call the product \(M \vec V_{\text{CM}}\) the center of mass momentum, \(\vec P_{\text{CM}}\text{,}\) which is actually equal to the total momentum of all particles in the body.
\begin{equation}
\vec P_{\text{CM}} = M \vec V_{\text{CM}} = \vec p_1 + \vec p_2 + \cdots + \vec p_N = \vec p_\text{total}. \tag{7.60}
\end{equation}