
Example 9.57. Moment of Inertia of a Baton about an Irregular Axis.
A \(1.2\text{-m}\) baton has a \(0.4\text{-kg}\) ball at each end. The rod of the baton has considerably smaller mass which we can ignore in this problem. The baton is held at \(0.5\text{ m}\) from one end and twirled so that the two masses rotate about a vertical axis at an angle of \(30^{\circ}\) from the axis.
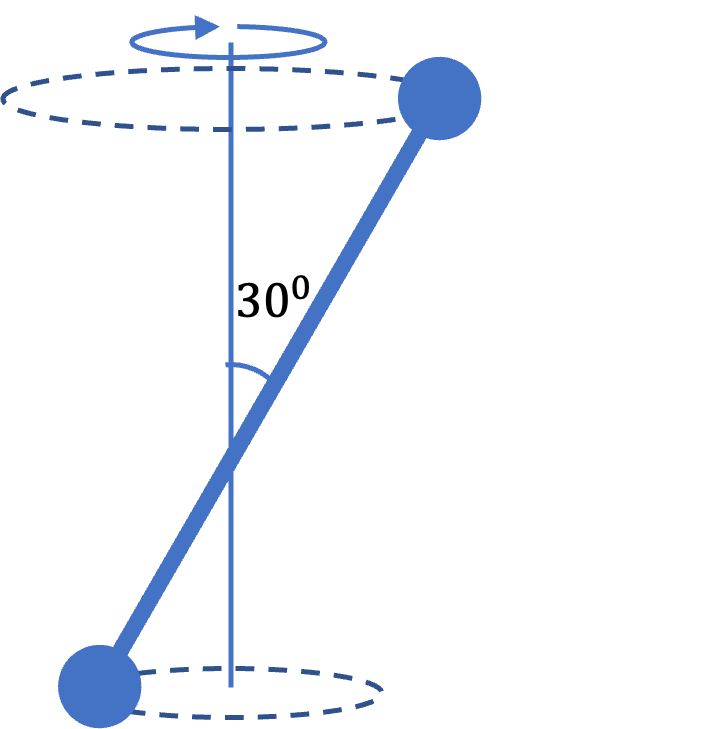
(a) Find the distances of the two masses from the axis of rotation.
(b) Find the moment of inertia of the baton about the axis described in the problem.
Answer.
(a) \(0.35\text{ m}\text{,}\) \(0.25\text{ m}\) (b) \(0.074\text{ kg.m}^2 \text{.}\)
Solution 1. a
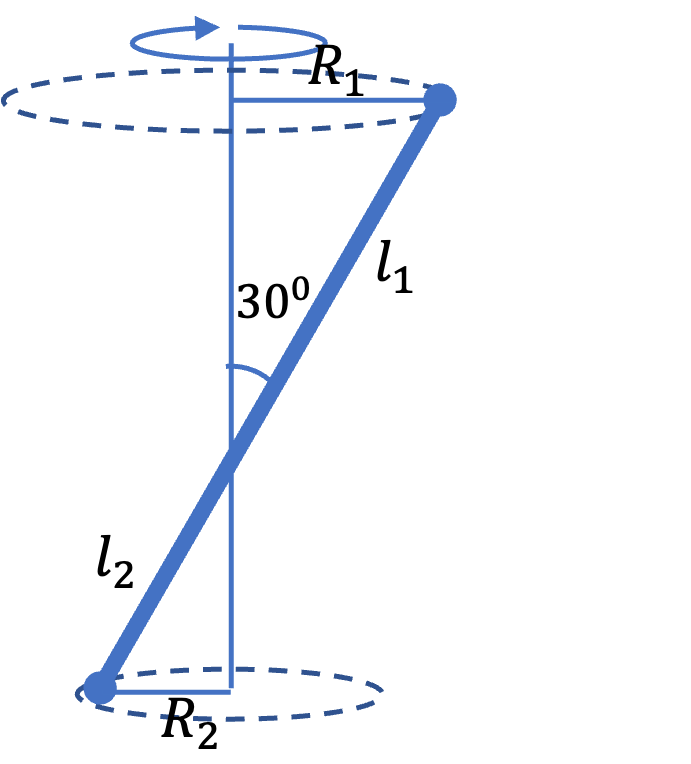
We figure out the distances from the radii of the circles in which the balls move. We do that by dropping a perpendicular from the masses to the axis and using trig on the triangle formed.
\begin{align*}
\amp R_1 = l_1\,\sin\,30^{\circ} = \dfrac{0.7}{2} = 0.35\text{ m}. \\
\amp R_2 = l_2\,\sin\,30^{\circ} = \dfrac{0.5}{2} = 0.25\text{ m}.
\end{align*}
Solution 2. b
From the masses and the distances from the axis, we get
\begin{equation*}
I = m_1 R_1^2 + m_2 R_2^2 = 0.4\times(0.35^2 + 0.25^2) = 0.074\text{ kg.m}^2.
\end{equation*}


















