

Example 40.14. Practice with Determining Underdamped, Overdamped, or Critically Damped Circuits.
Determine if the circuits in Figure 40.15 are under-damped, over-damped, or critically damped.
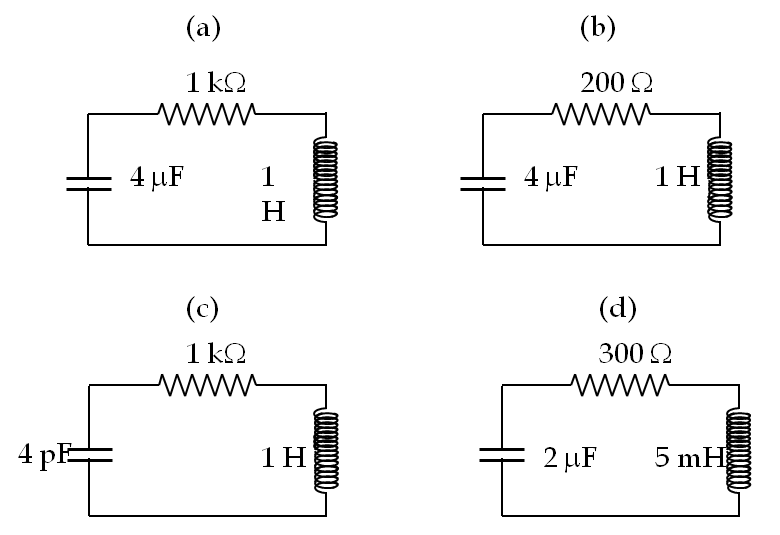
Solution 1. (a)
We will use damping parameter \(\beta = \gamma/2\) rather than \(\gamma\text{.}\) It will simplify notation.
The parameters of the given circuit are
\begin{align*}
\amp \beta = \dfrac{R}{2L} = \dfrac{1000\:\Omega}{2\times 1\:\text{H}} = 500\:\text{sec}^{-1},\\
\amp \omega_0 = \dfrac{1}{\sqrt{LC}} = \dfrac{1}{\sqrt{1\:\text{H}\times 4\times 10^{-6}\:\text{F}}} = 500\:\text{sec}^{-1}.
\end{align*}
Since \(\omega_0 = \beta\text{,}\) this circuit is critically damped.
Solution 2. (b)
We will use damping parameter \(\beta = \gamma/2\) rather than \(\gamma\text{.}\) It will simplify notation.
The parameters of the given circuit are
\begin{align*}
\amp \beta = \dfrac{R}{2L} = \dfrac{200\:\Omega}{2\times 1\:\text{H}} = 100\:\text{sec}^{-1},\\
\amp \omega_0 = \dfrac{1}{\sqrt{LC}} = \dfrac{1}{\sqrt{1\:\text{H}\times 4\times 10^{-6}\:\text{F}}} = 500\:\text{sec}^{-1}.
\end{align*}
Since \(\omega_0 \gt \beta\text{,}\) this circuit is under-damped.
Solution 3. (c)
We will use damping parameter \(\beta = \gamma/2\) rather than \(\gamma\text{.}\) It will simplify notation.
The parameters of the given circuit are
\begin{align*}
\amp \beta = \dfrac{R}{2L} = \dfrac{1000\:\Omega}{2\times 1\:\text{H}} = 500\:\text{sec}^{-1},\\
\amp \omega_0 = \dfrac{1}{\sqrt{LC}} = \dfrac{1}{\sqrt{1\:\text{H}\times 4\times 10^{-12}\:\text{F}}} = 500,000\:\text{sec}^{-1}.
\end{align*}
Since \(\omega_0 > \beta\text{,}\) this circuit is under-damped.
Solution 4. (d)
We will use damping parameter \(\beta = \gamma/2\) rather than \(\gamma\text{.}\) It will simplify notation.
The parameters of the given circuit are
\begin{align*}
\amp \beta = \dfrac{R}{2L} = \dfrac{300\:\Omega}{2\times 5\times 10^{-3}\:\text{H}} = 30,000\:\text{sec}^{-1},\\
\amp \omega_0 = \dfrac{1}{\sqrt{LC}} = \dfrac{1}{\sqrt{5\times 10^{-3}\:\text{H}\times 2\times 10^{-6}\:\text{F}}} = 10,000\:\text{sec}^{-1}.
\end{align*}
Since \(\omega_0 \lt \beta\text{,}\) this circuit is over-damped.



