Remark 9.88.
Do not confuse torque with force. They are entirely different quantities. Some major difference between torque and force to keep in mind are:
- Torque depends on the choice of the pivot point about which torque is to be evaluated. Force has no such dependency.
- Torque and force are perpendicular to each other since torque is defined as the cross product of a displacement vector and force.
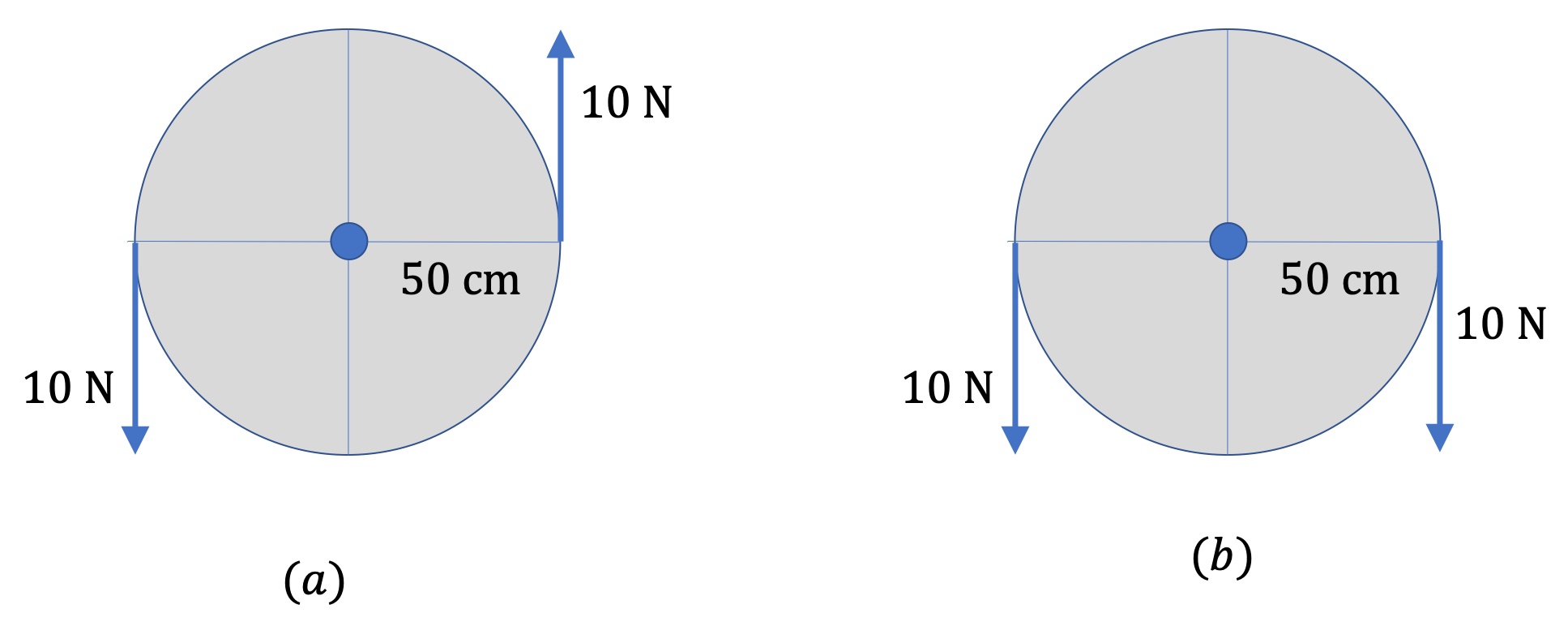
- There can be torque on a system even when net force is zero. For instance, in Figure 9.89(a), the equal magnitude forces act in the opposite directions on the opposite ends of a wheel, resulting in a zero net force, but the net torque about the center is not zero. Actually, the net torque has magnitude \(1.0 \text{ N.m}\) and direction out-of-page.
- Net force an a system may not be zero even when torque is zero. In Figure 9.89(b), the equal magnitude forces act in the same directions on the opposite ends of a wheel, resulting in a zero net torque, but non-zero net force. Actually, net force is \(20 \text{ N}\) down.