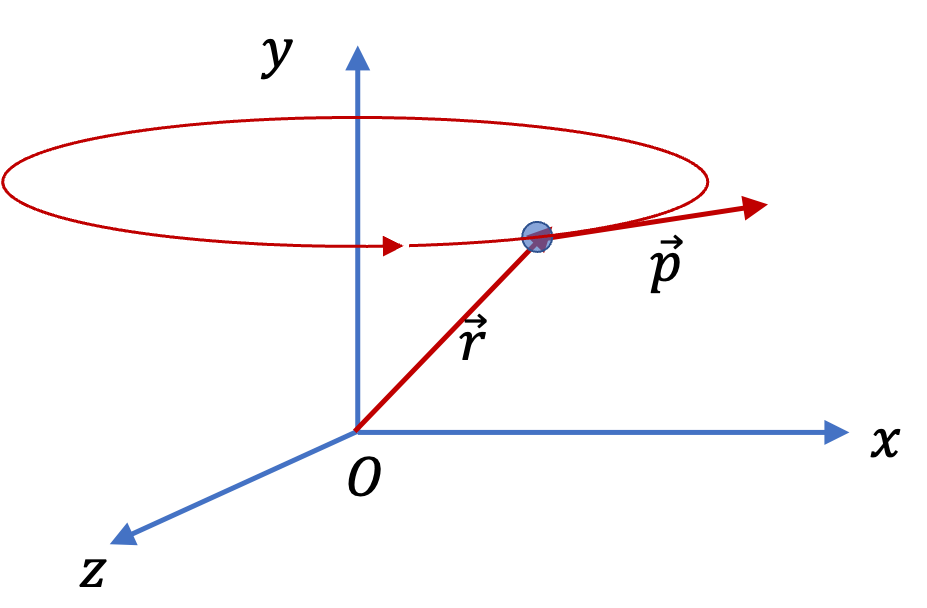
Consider a point particle of mass \(m\) at position \(\vec r\) from origin \(O\) is moving with speed \(\vec v\text{.}\) Then, angular momentum with respect to O is given by
\begin{equation}
\vec L = \vec r \times \vec p = m \vec r \times \vec v.\tag{10.7}
\end{equation}
Figure10.11.
We can write this also using angular velocity \(\vec \omega\text{.}\) Let us suppose that this coordinate system is the fixed coordinate system \(O'x'y'z'\) we have discussed in the last section. When discussing angular velocity we found that
\begin{equation*}
\vec v = \vec \omega \times \vec r.
\end{equation*}
Therefore, angular momentum can also be written as
\begin{equation}
\vec L = m \vec r \times (\vec \omega \times \vec r).\tag{10.8}
\end{equation}
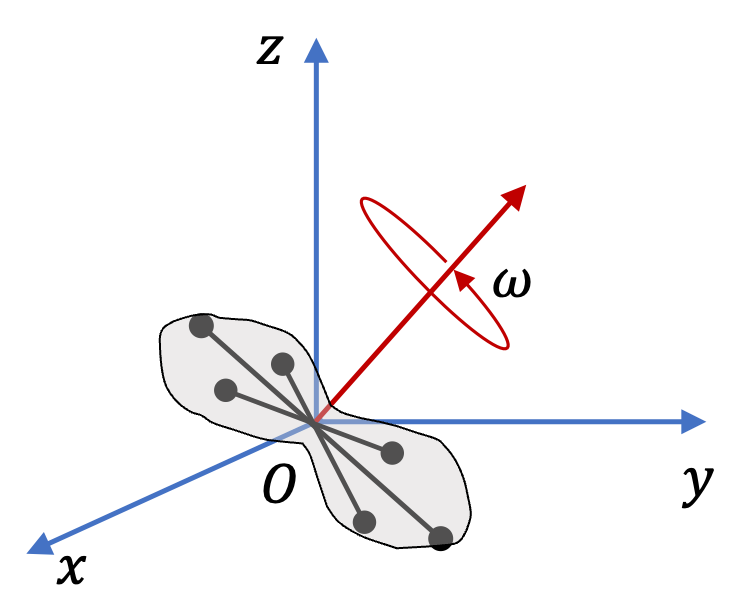
When a rigid body rotates, all of its particles rotate at the same angular velocity. But since different particles will be in different positions, their \(\vec r\) will be different. Say, we represent a rigid body by a collection of point particles of masses \(m_i\text{,}\)\(i = 1, 2, \cdots, N\text{.}\) Then, angular momentum of the body about O will be
Often it is helpful to drop the suffix that denumerates particles and just use the summation sign.
\begin{align}
\amp L_x = \sum m \left( y^2 + z^2\right)\omega_x - \sum m x y \omega_y - \sum m x z \omega_z.\tag{10.10}\\
\amp L_y = \sum m \left( x^2 + z^2\right)\omega_y - \sum m y x \omega_x - \sum m y z \omega_z.\tag{10.11}\\
\amp L_z = \sum m \left( x^2 + y^2\right)\omega_z - \sum m z x \omega_x - \sum m z y \omega_y.\tag{10.12}
\end{align}
Often, we write relation between components of \(\vec L\) and \(\vec \omega\) using a matrix multiplication notation.
\begin{equation}
\begin{pmatrix}
L_x\\
L_y\\
L_z
\end{pmatrix} =
\begin{pmatrix}
\sum m \left( y^2 + z^2\right) \amp - \sum m x y \amp - \sum m x z\\
- \sum m y x \amp \sum m \left( x^2 + z^2\right) \amp - \sum m y z\\
- \sum m z x \amp - \sum m z y \amp \sum m \left( x^2 + y^2\right)
\end{pmatrix}
\begin{pmatrix}
\omega_x\\
\omega_y\\
\omega_z
\end{pmatrix} \tag{10.13}
\end{equation}
We write this equation in a formal way by denoting the quantities in the matrix by bold letter \({\bf I}\text{.}\)
\begin{equation}
\vec L = {\bf I}\, \vec \omega.\tag{10.14}
\end{equation}
Unlike vectors \(\vec L\) and \(\vec \omega\text{,}\) which have three Cartesian components, \({\bf I}\) has nine components. We call \({\bf I}\) moment inertial tensor. There are other tensor type properties in physics such as electic conductivity and refractive index tensors. The components of tensor are denoted by two subscripts corresponding to the axes. Thus,
\begin{align}
\amp I_{xx} = \sum m \left( y^2 + z^2\right),\ \ I_{xy} = - \sum m x y,\ \ I_{xz} = - \sum m x z\tag{10.15}\\
\amp I_{yx} = - \sum m y x,\ \ I_{yy} = \sum m \left( x^2 + z^2\right) ,\ \ I_{yz} = - \sum m y z\tag{10.16}\\
\amp I_{zx} = - \sum m z x,\ \ I_{zy} = - \sum m z y,\ \ I_{zz} = \sum m \left( x^2 + y^2\right) \tag{10.17}
\end{align}
The diagonal components, \(I_{xx}\text{,}\)\(I_{yy}\text{,}\)\(I_{zz}\) are called moments of inertia about \(x\text{,}\)\(y\text{,}\) and \(z\) axes respectively. The off-diaginal components do not have such simple interpretations.
If a body is regarded as continuous, the sum in these definitions become integrals. To go from sum over masses to integrals over space, we replace \(m\) by \(\rho dV\text{,}\) where \(\rho\) is the density, \(dV\) is a volume element. In the case of two-dimensional structure, you will have area element \(dA\) and in the case of a one-dimensional structure it will be just a size \(ds\text{.}\) Thus, the diagonal elment \(I_{zz}\) will be
\begin{equation}
I_{zx} = -\int\, \rho \, z x \, dV.\tag{10.19}
\end{equation}
The other components of \({\bf I}\) will be obtained in a similar way.
From the matrix representation of \({\bf I}\text{,}\) it is obvious that it is a symmetric matrix. We say that moment of inertia is a symmetric tensor. Since symmetric matrices can always be diagonalized, there is a choice of direction of the body-attached axes so that off-diagonal elements turn out to be zero. We call these axes principal axes. In principal axes we will have only three non-zero moment of inertia components; in that case, we just denote them by simpler symbols, \(I_1\text{,}\)\(I_2\text{,}\)\(I_3\text{.}\)
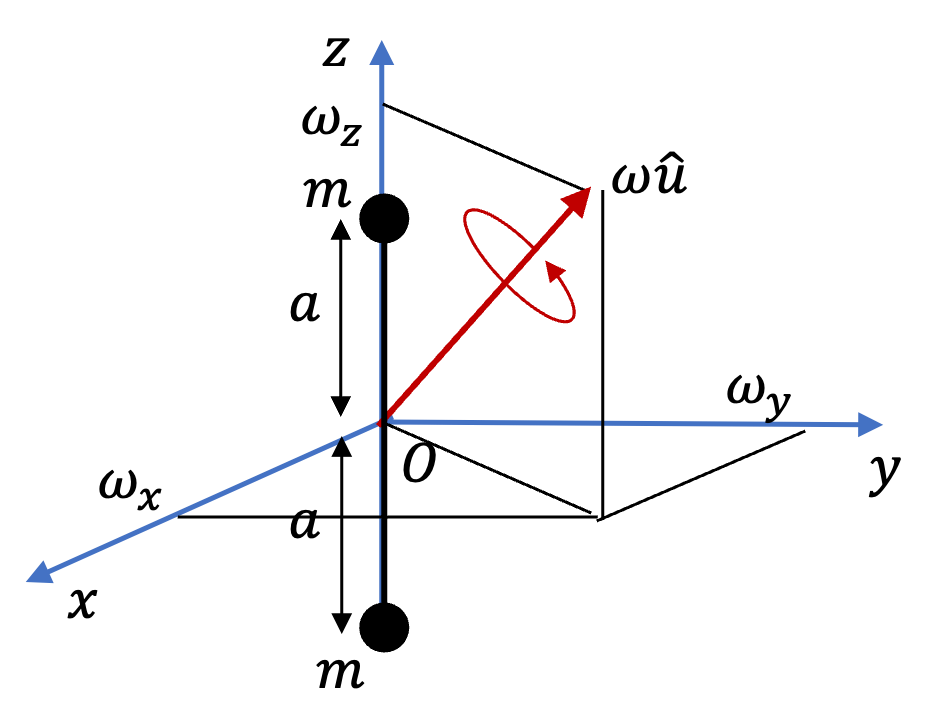
Figure 10.14 shows a dumbbell of two point masses \(m\) and length \(2a\) placed on \(z\)-axis and rotating about the axis in the direction of unit vector \(\hat u\text{.}\) Ignore the mass of the connecting rod. Find the angular momentum of the dumbbell.
Figure10.14.
Answer.
\(\vec L = 2 m a^2 \omega_x \hat i + 2 m a^2 \omega_y \hat j \text{.}\)
Solution.
First we find moments of inertia using coordinates of the two masses. The coordinates of the two point masses of the rigid body are
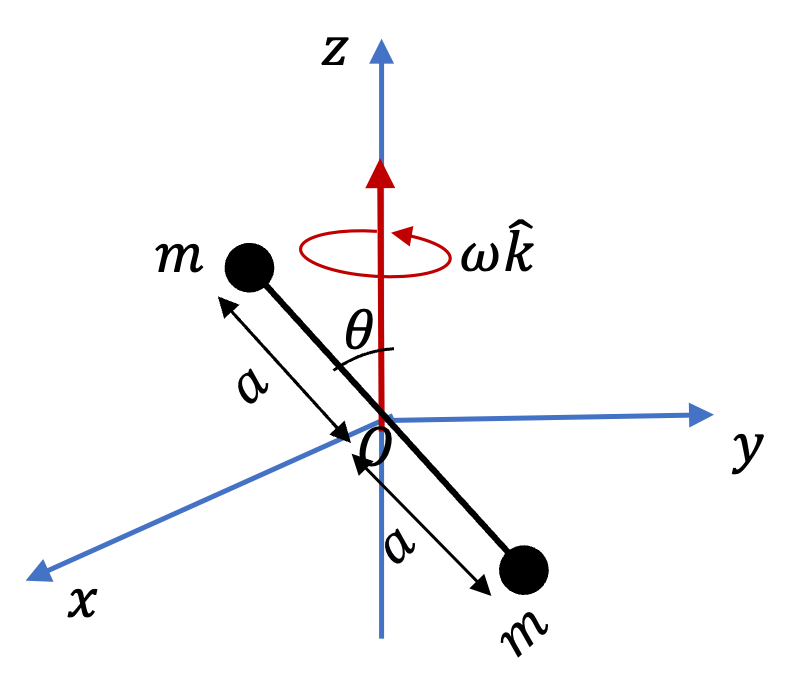
Example10.15.Angular Momentum of a Dumbbell About Arbitrary Axis.
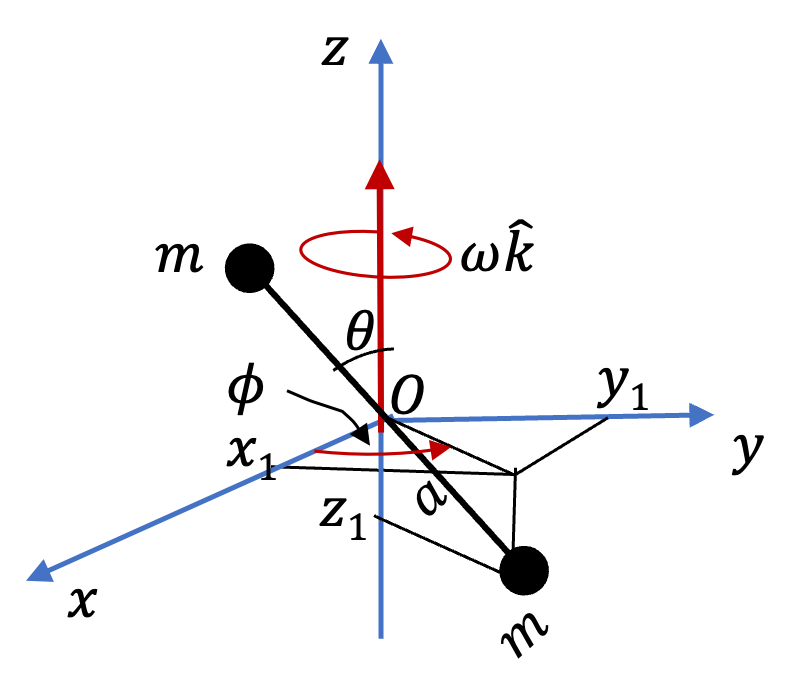
Figure 10.16 shows a dumbbell of two point masses \(m\) and length \(2a\) that rotates about an axis at angular speed \(\omega\) that is not a principal axis of the dumbbell. Pointing \(z\)-axis towards the axis of rotation leaves the dumbell rotating at an angle \(\theta\) with respect to the axis.
Figure10.16.
Supposing that the masses are in \(xz\)-plane at time \(t=0\) so that azimuth of one of the masses is \(\phi=\omega t\text{.}\) (a) Find angular momentum vector at an arbitrary instant. (b) Show that the magnitude of angular momentum is constant in time. Ignore the mass of the connecting rod.
Answer.
(b) \(2m\omega a^2\sin\theta\text{.}\)
Solution1.a
First we find moments of inertia using coordinates of the two masses and then pick a moment in time to find \(x\) and \(y\) coordinates in terms of spherical angles.
Let’s work out coordinates of the two masses at an instant when the azimuth angle for one of the masses is \(\phi=\omega t\) as shown in Figure 10.17. From this figure, we can work out following coordinates of the two masses.
\begin{equation*}
L = 2m\omega a^2\sin\theta.
\end{equation*}
Since we do not have \(\phi\) in the magnitude, it is constant in time.
ExercisesExercises
1.Angular Momentum of a Rolling Structure.
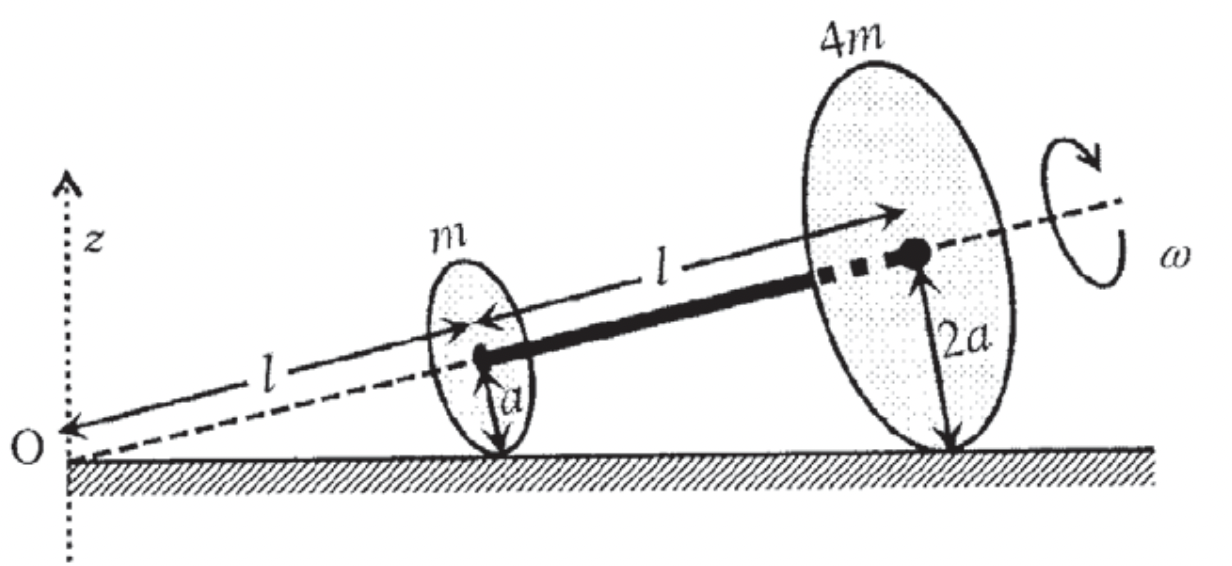
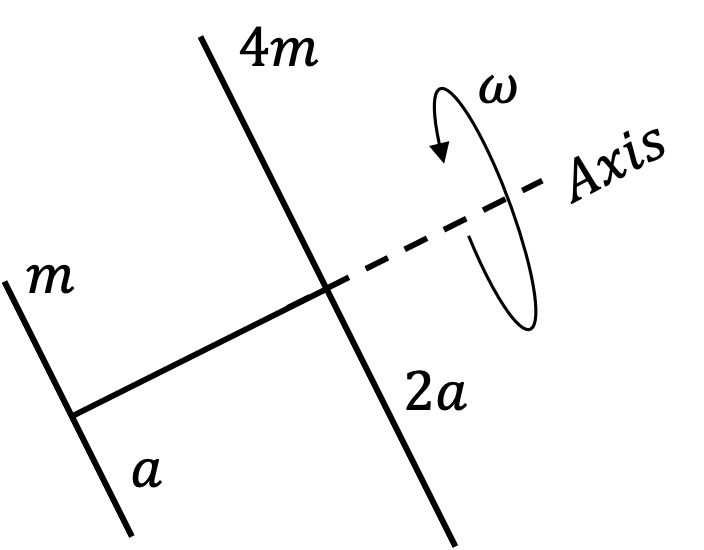
(Indian JEE 2016) Two thin circular discs of mass \(m\) and \(4m\text{,}\) having radii of \(a\) and \(2a\text{,}\) respectively, are rigidly fixed by a massless, rigid rod of length = \(\sqrt{24}\,a\) through their centres. This assembly is laid on a firm and flat surface, and set rolling without slipping on the surface so that the angular speed about the axis of the rod is \(\omega\text{.}\) The angular momentum of the entire assembly about the point ’O’ is \(\vec L\) (see Figure 10.18). Which of the following statement(s) is(are) true?
The centre of mass of the assembly rotates about the \(z\)-axis with an angular speed of \(\omega/5\text{.}\)
The magnitude of angular momentum of centre of mass of the assembly about the point O is \(81 ma^2\omega\text{.}\)
The magnitude of angular momentum of the assembly about its centre of mass is \(17 ma^2\omega/2\text{.}\)
The magnitude of the \(z\)-component of \(L\) is \(55 ma^2\omega\text{.}\)
Figure10.18.
Hint.
Answer.
Solution1.a
Center of mass of the assymbly will rotate at same angular speed as the rolling of the smaller disk.
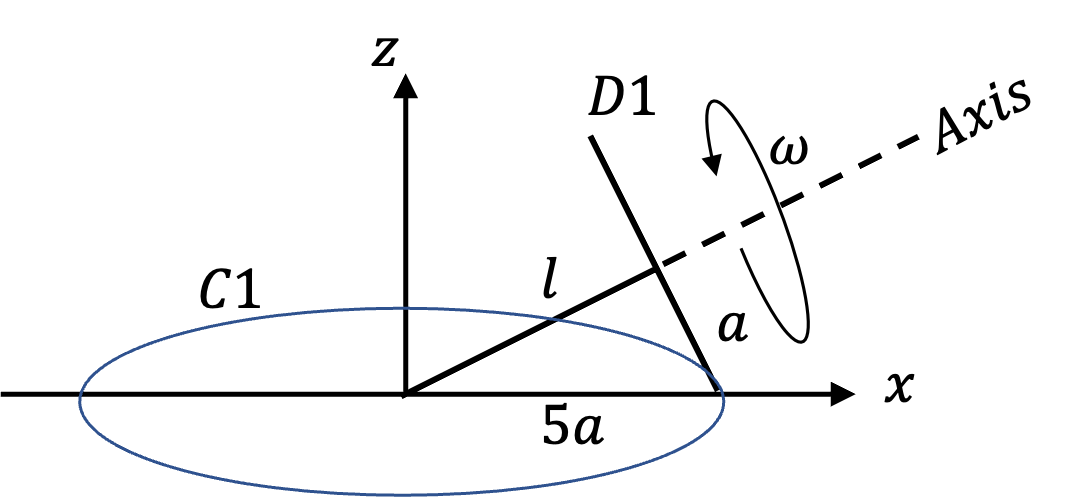
Figure 10.19 shows bottom point of smaller disk goes around \(z\)-axis in circle C1 of radius \(\sqrt{l^2 + a^2} = 5a\text{.}\) That means, in the time a point on the disk makes once around the \(z\)-axis, the disk rotates \(5\) times.
Figure10.19.
Hence, angular frequency will be one-fifth. Therefore, centre of mass of the assembly rotates about the \(z\)-axis with an angular speed of \(\omega/5\text{.}\)
Solution2.b
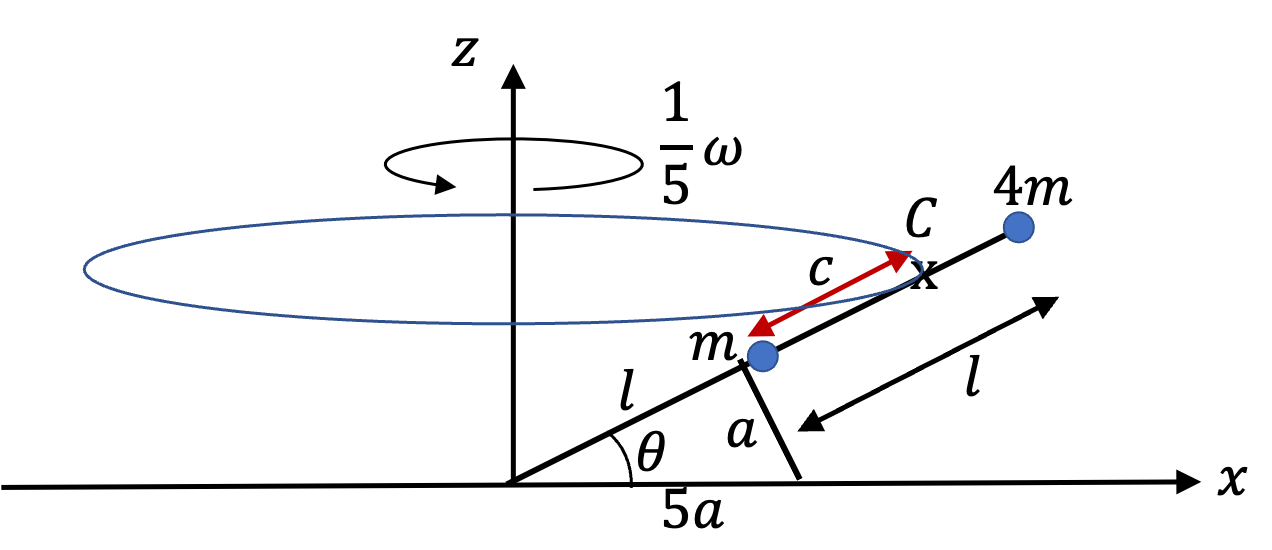
In Figure 10.20 I have replaced the disks by point masses at their centers. The CM will be between these two points. Temoprarily you can place origin at \(m\) and use an axis towards the other mass. This gives
\begin{equation*}
c = \frac{4ml}{m+4m} =\frac{4}{5}\,l.
\end{equation*}
Figure10.20.
Therefore, the CM moves in a circle of radius
\begin{equation*}
R = (l+c)\,\cos\theta = \frac{9l}{5}\times\frac{l}{5a} = 8.64a.
\end{equation*}
It is rotating about \(z\)-axis at \(\omega/5\) with moment of inertia \((m+4m)R^2\text{.}\) Therefore,
The two-disk structure rotates about axis through the CM at angular speed \(\omega\text{.}\) The moment of inertia of the structure will be
\begin{equation*}
I = \frac{1}{2}ma^2 + \frac{1}{2}(4m)(2a)^2 = \frac{17}{2}ma^2.
\end{equation*}
Figure10.21.
Therefore, angular momentum about this axis is
\begin{equation*}
L = \frac{17}{2}ma^2\omega.
\end{equation*}
Solution4.d
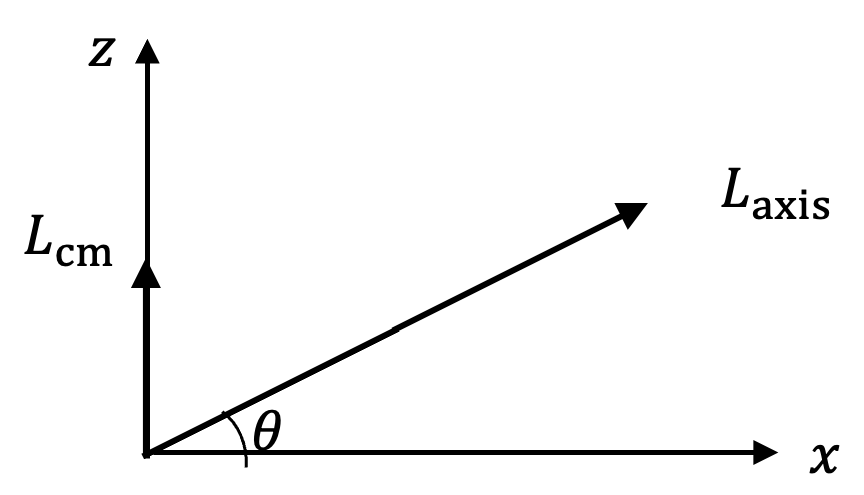
We can get \(z\)-component of net angular momentum \(\vec L\) by adding components of the angular momentum about the axis through the CM and angular momentum of the CM about \(z\)-axis. We have already worked these out above.