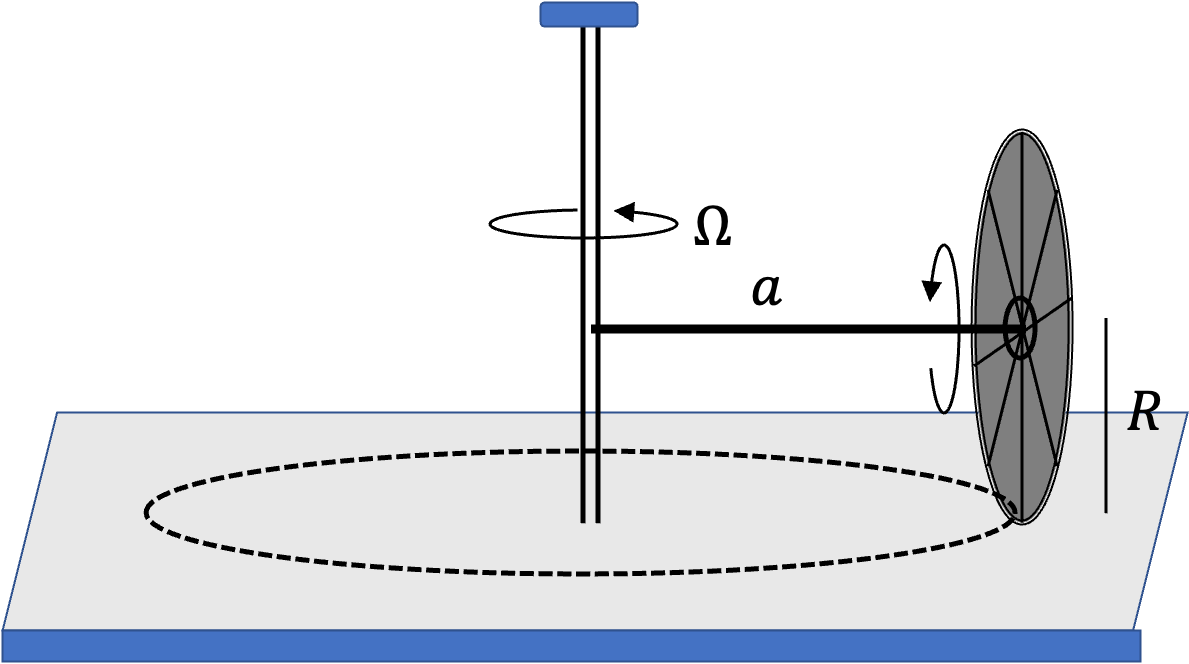
We can get speed of rotation of disk about the axle by noting that in the time \(\Delta t\) in which the disk goes once around in a circle of radius \(a\text{,}\) a point on the disk woould travel \(2\pi R n\) where \(n\) is the number of rotations. That is
\begin{equation*}
2\pi R n = 2\pi a.
\end{equation*}
Therefore
\begin{equation*}
n = a/R.
\end{equation*}
We use angular speed for rolling around in circle of radius \(a\) to find time for going once around.
\begin{equation*}
\Delta t = \frac{2\pi}{\Omega}.
\end{equation*}
Therefore, angular speed for rotation about axle is
\begin{equation*}
\omega = \frac{2\pi n}{\Delta t} = \frac{\Omega}{2\pi} \times \frac{ 2\pi a }{R} = \frac{a\Omega}{R}.
\end{equation*}
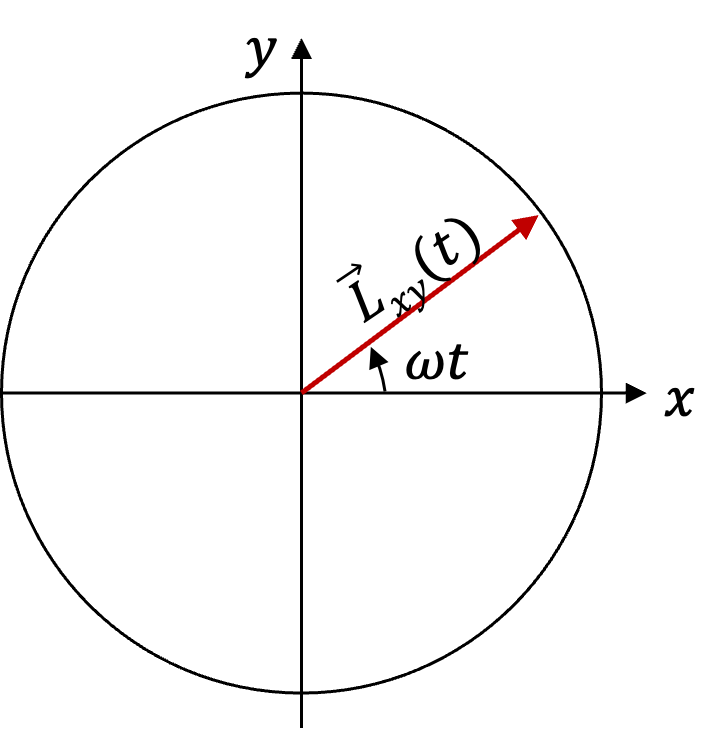
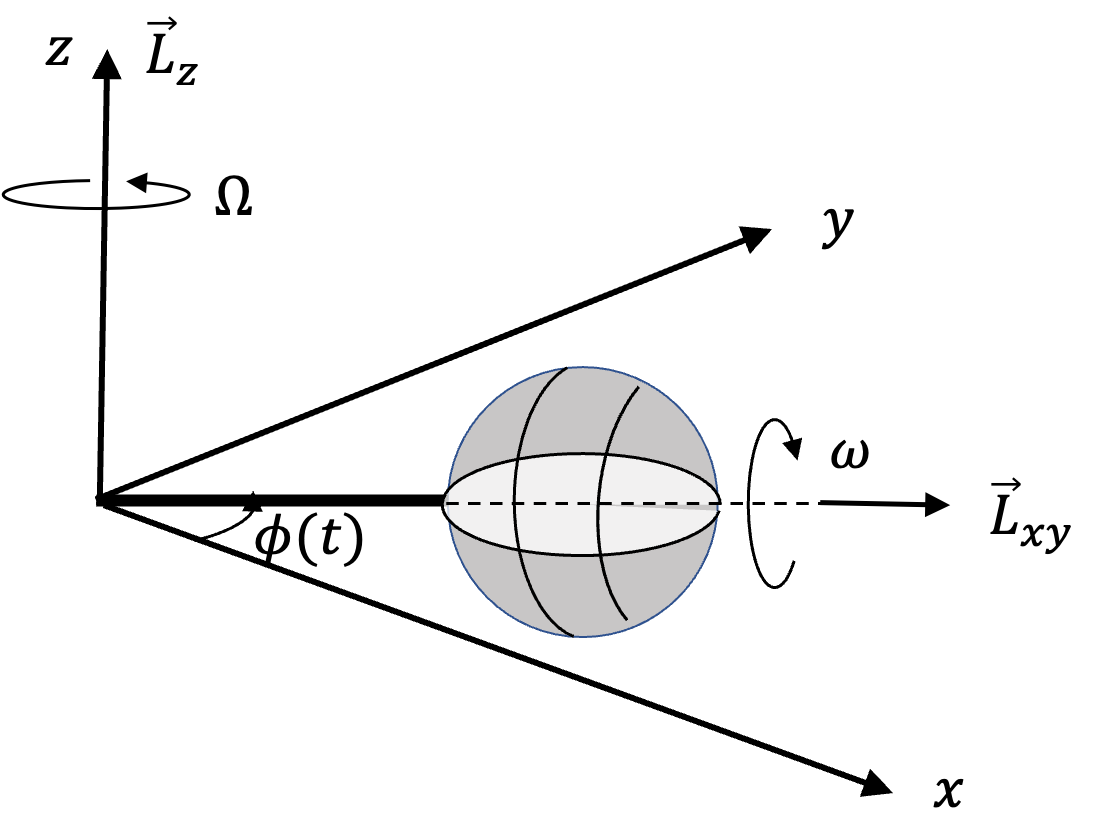
Since the disk is uniformly going around the central shaft, vertical component of angular momentum is constant in time.
However, since the direction of axle is changing at rate
\(\Omega\text{,}\) angular momnetum about axle will be a function of time. Just as we have seen in
Example 10.38, we denote angular momentum pointed in the direction of axle by
\(\vec L_{xy}\text{.}\)
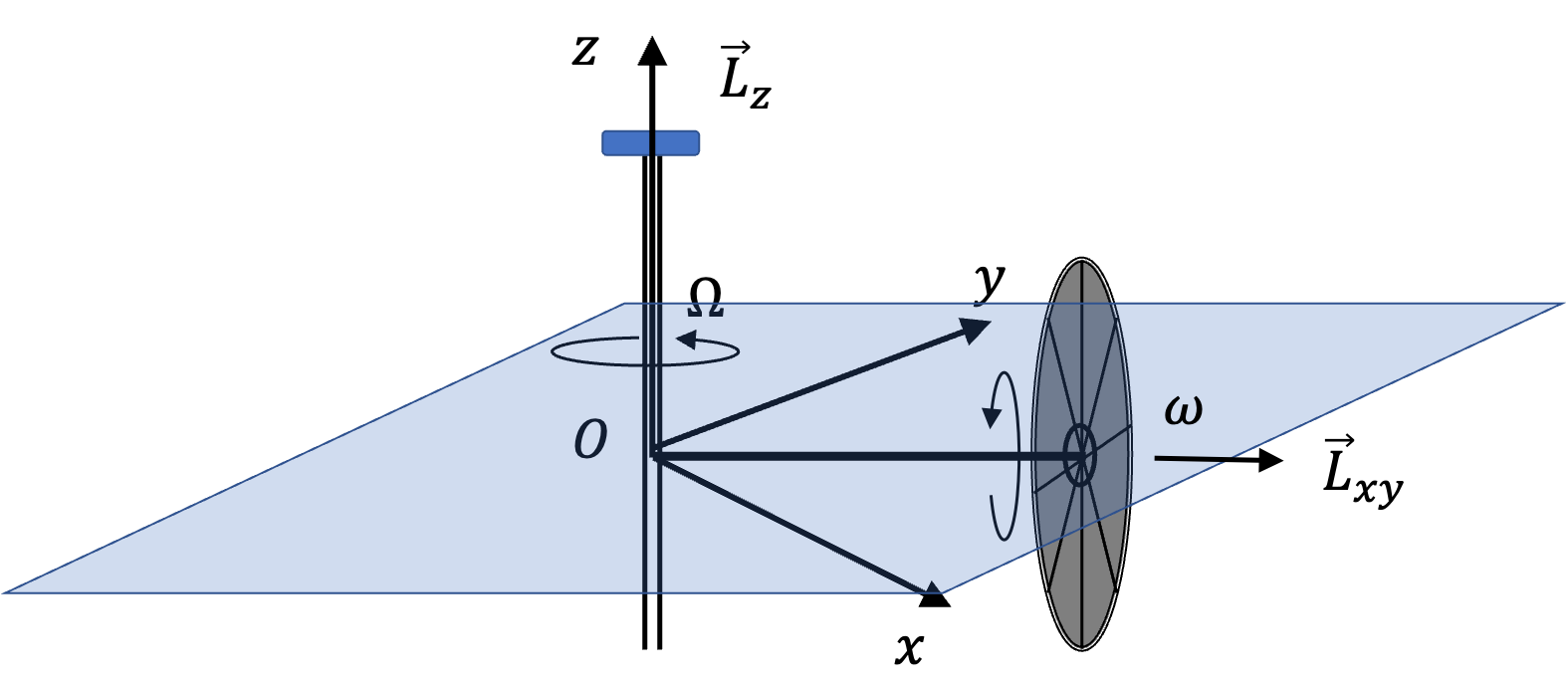
The magnitude of \(\vec L_{xy}\) will be \(I\omega\) with \(I=\frac{1}{2}MR^2\) with direction changing with time as given by the unit vector \(\hat u = \cos\Omega t\, \hat i + \sin\Omega t\, \hat j\text{.}\) Thus,
\begin{equation*}
\vec L_{xy} = \frac{1}{2}MR^2\omega\, \left(\cos\Omega\,t \, \hat i + \sin\Omega\,t \, \hat j \right),
\end{equation*}
with \(\vec L = \vec L_{xy} + \vec L_z\text{.}\) To find torque, we just need to take a derivative with respect to time. Since, \(L_z\) is not changing with time, we need derivative of only \(\vec L_{xy}\text{.}\)
\begin{align*}
\vec{ \mathcal{T} } \amp = \frac{d\vec L}{dt} = \frac{d\vec L_{xy}}{dt}\\
\amp = \frac{1}{2}MR^2\omega\Omega\, \left(-\sin\Omega\,t \, \hat i + \cos\Omega\,t \, \hat j \right)
\end{align*}