Example 4.75. Stepwise Varying Acceleration.
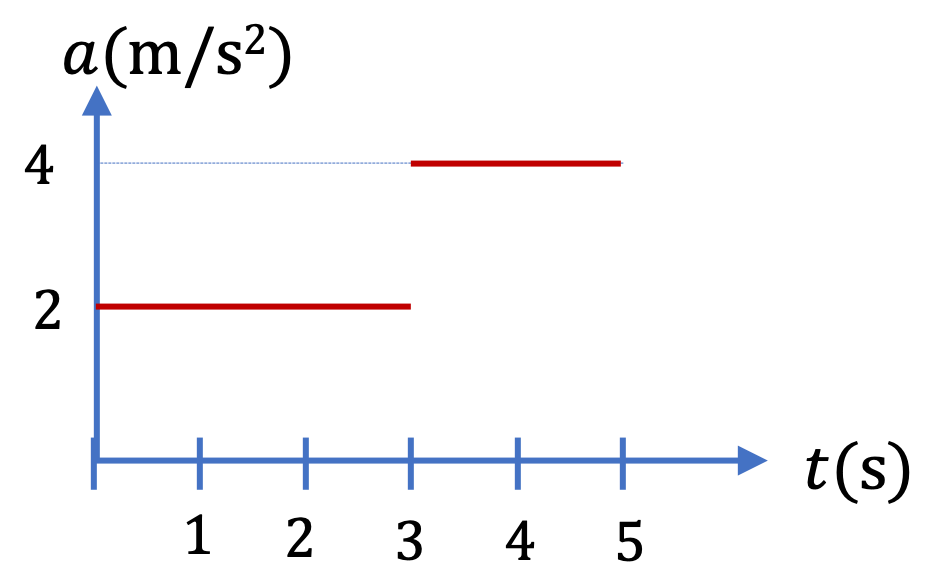
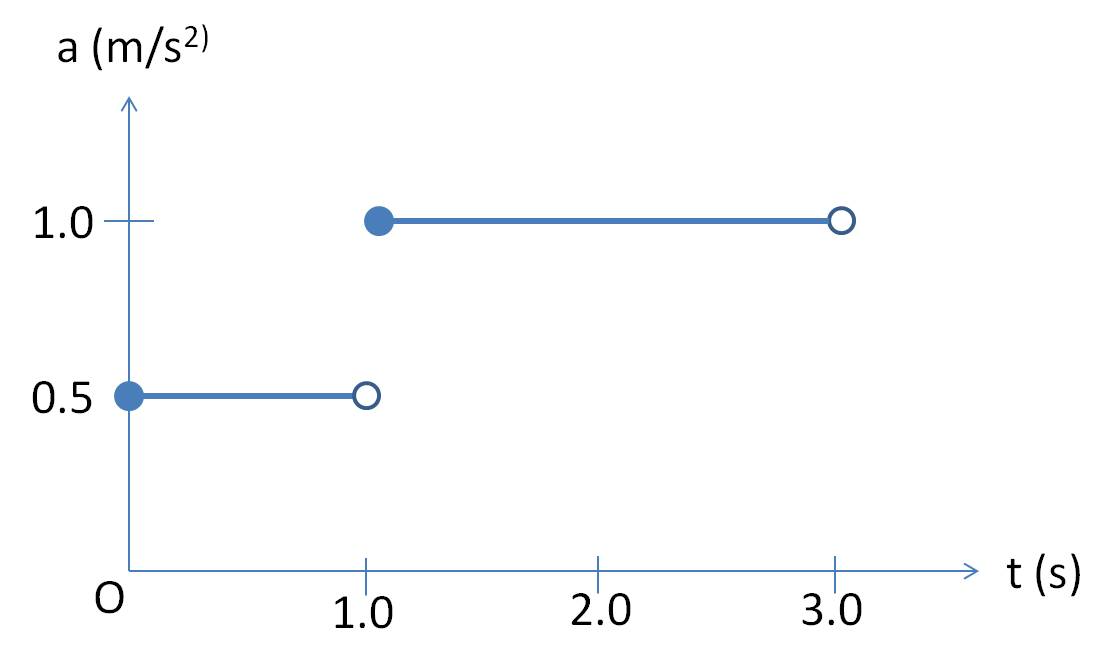
A train starts out at rest and moves in a straight line. The acceleration of the train changes with time, with magnitude \(0.5 \text{ m/s}^2\) between \(t = 0\) and \(t = 1 \text{ sec}\text{,}\) and then with magnitude \(1 \text{ m/s}^2\) between \(t = 1 \text{ sec}\) and \(t =3\ \text{sec}\) as shown in Figure 4.76. Find the position and the velocity of the train at \(t = 3 \text{ sec}\text{.}\)
Solution.
As discussed above, we work out each constant acceleration segment one after the other.
Let’s list the information about this interval as follows.
\begin{align*}
\amp x_i = 0\ \text{(setting the initial position at the origin);}\\
\amp v_{ix} = 0\ \text{ (initially at rest);}\\
\amp a_x = 0.5 \text{ m/s}^2\ \text{ (constant -acceleration during this interval);}\\
\amp \text{Set t = 0 at the beginning of the interval so that we can use the standard formulas.} \\
\amp t = 1 \text{ s} \ \text{ (duration of this interval);}
\end{align*}
With this information, we need to find \(x\) and \(v\text{,}\) the position and velocity at the end of interval.
\begin{align*}
\amp v_x = v_{ix} + a_x t = 0 + 0.5\times 1 = 0.5 \text{ m/s};\\
\amp x = x_i + v_{ix} t + \frac{1}{2}a_xt^2 \\
\amp = 0 + 0 + \frac{1}{2}\times 0.5\times 1^2 = 0.25 \text{ m}.
\end{align*}
Using the information at the end of the previous segment of time, we now know the following information for this interval.
\(x_i = 0.25 \text{ m}\) since initial \(x\)-position here is the final \(x\)-position at the end of the previous interval.
\(v_{ix} = 0.5 \text{ m/s}\) since initial \(x\)-velocity here is the final \(x\)-velocity at the end of the previous interval.
\(t = 2 \text{ s}\) duration of this interval is from \(t= 1\text{ s}\) to \(t = 3 \text{ s}\) or \((3\text{ s}-1\text{ s}=2\text{ s})\text{.}\)
With this information, we need to find \(x\) and \(v_x\text{,}\) the \(x\)-position and \(x\)-velocity at the end of interval.
\begin{align*}
\amp v_x = v_{ix} + a t = 0.5 + 1\times 2 = 2.5 \text{ m/s};\\
\amp x = x_i + v_{ix} t + \frac{1}{2}a_xt^2 \\
\amp = 0 + 0.5\times 2 + \frac{1}{2}\times 1.0\times 2^2 = 3.0 \text{ m}.
\end{align*}
Therefore, the train is at \(3.0 \text{ m}\) from where it was at \(t=0\) and it is moving at \(2.5\text{ m/s}\) at \(t=3.0 \text{ s}\) mark.