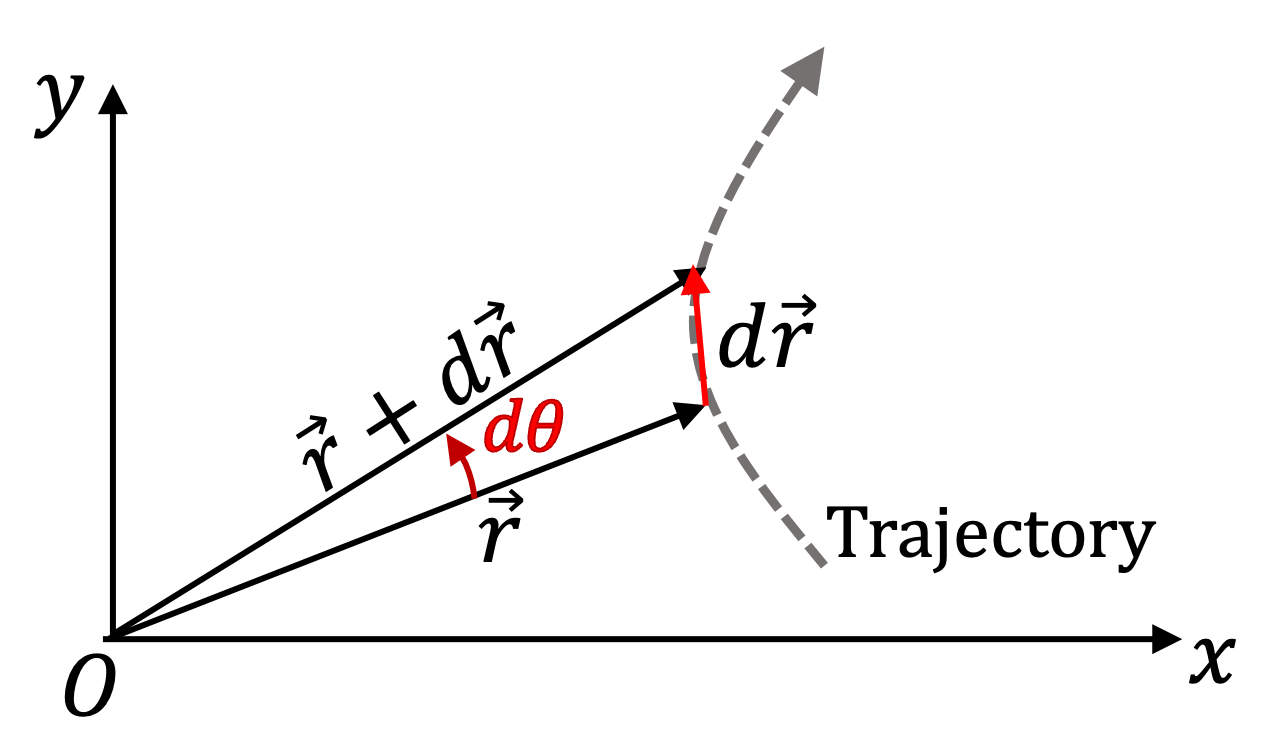
Velocity is the derivative of position vector.
\begin{equation*}
\vec v = \dfrac{d\vec r}{dt}.
\end{equation*}
If we use Eq.
(5.27), we would get
\begin{equation*}
\vec v = \dfrac{d }{dt}\left( r\, \hat u_r \right).
\end{equation*}
Expanding the right side, using the product rule,
\begin{equation}
\vec v = \frac{d r}{dt}\, \hat u_r + r\, \frac{d \hat u_r}{dt}.\tag{5.29}
\end{equation}
We are now stuck since
\begin{equation*}
\frac{d \hat u_r}{dt} e 0,
\end{equation*}
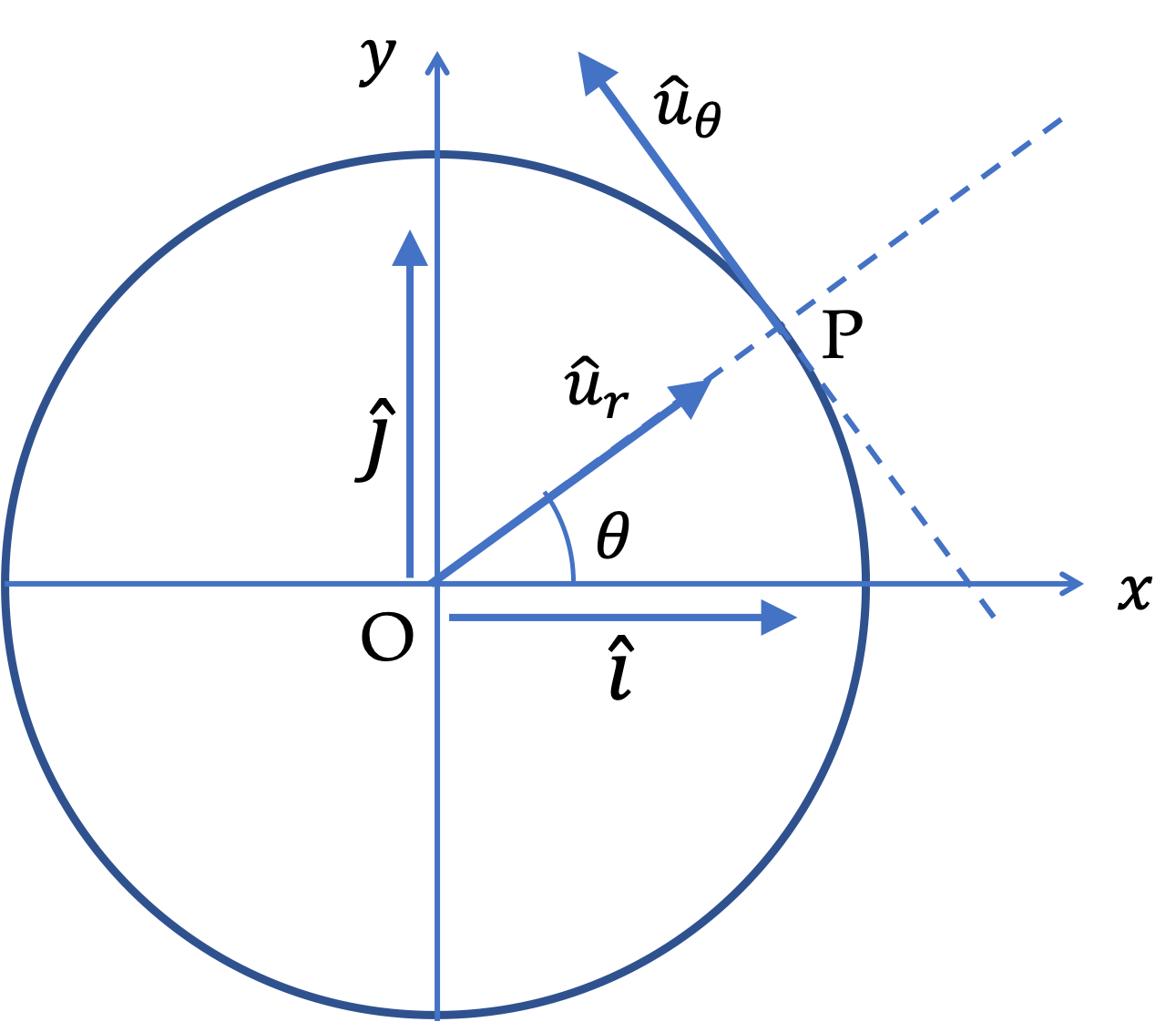
since \(\hat u_r \) depends on the direction of the position, which is a time-dependent. However, the Cartesian unit vecotrs \(\hat i\) and \(\hat j\) are independent of position, i.e.,
\begin{equation}
\frac{d \hat i}{dt} = 0,\ \ \ \frac{d \hat j}{dt} = 0.\tag{5.30}
\end{equation}
That means, to evaluate \(\dfrac{d \hat u_r}{dt}\text{,}\) we should work with the expression of \(\hat u_r\) in terms of \(\hat i\) and \(\hat j\text{.}\)
\begin{align*}
\dfrac{d \hat u_r}{dt} \amp = \dfrac{d }{dt} \left(\cos\theta\, \hat i+ \sin\theta\, \hat j\right),\\
\amp = \left(-\sin\theta\, \hat i+ \cos\theta\, \hat j\right) \dfrac{d\theta}{dt}.\\
\amp = \left(\frac{d\theta}{dt}\right)\, \hat u_\theta.
\end{align*}
The derivative \(d\theta/dt\) gives us the rate at which the angular variable changes, and therefore, it is called the angular velocity. It is denoted by the small “omega”, \(\omega\text{.}\)
\begin{equation}
\omega = \frac{d\theta}{dt}.\tag{5.31}
\end{equation}
Therefore, the velocity in Eq.
(5.29) will be
\begin{equation}
\vec v = \frac{d r}{dt}\, \hat u_r + \omega\, r\, \hat u_\theta.\tag{5.32}
\end{equation}
It is also helpful to introduce the notation for the rate of change of the radial coordinate \(r \text{:}\)
\begin{equation}
v_r = \frac{dr}{dt}.\tag{5.33}
\end{equation}
This is called radial velocity. The product \(\omega\, r \) is the tangential velocity, denoted by \(v_\theta\text{.}\)
\begin{equation}
v_\theta = \omega\, r.\tag{5.34}
\end{equation}
Finally, we get a simple expression for the velocity
\begin{equation}
\vec v = v_r\, \hat u_r + v_\theta\, \hat u_\theta.\tag{5.35}
\end{equation}