
Example 6.52. Kinetic Friction on an Accelerating Book.
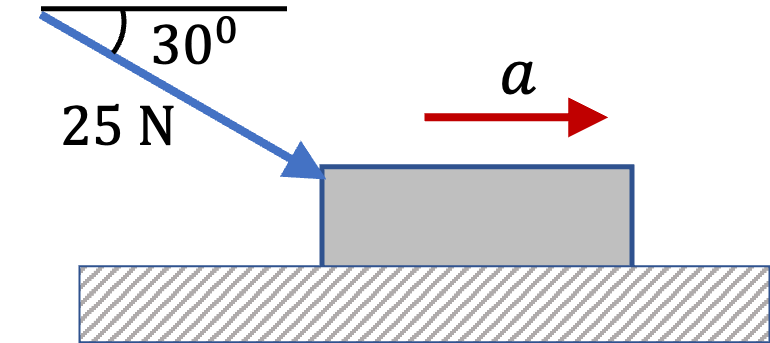
The coefficient of kinetic friction between the book and the table, determined in another experiment, is \(\mu_k = 0.3 \text{.}\)
(a) What is the acceleration of the book when sliding?
(b) How far would the book slide in \(0.5 \text{ sec}\)
(c) How long will the book take to reach a speed of \(2.0 \text{ m/s} \text{?}\)
Answer.
Solution 1. a
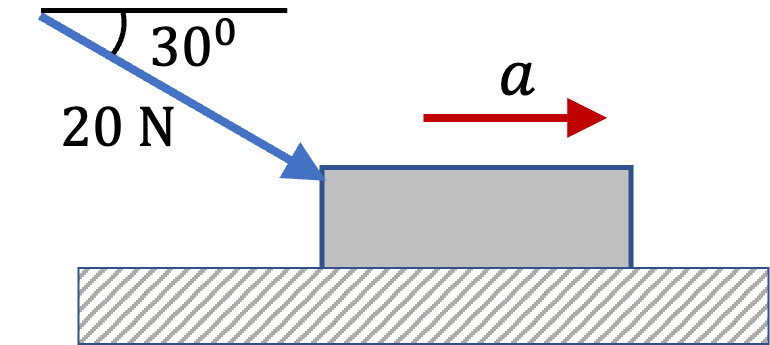
Note that the description of the problem has several numbers that would not be used in solving the problem. They are there to give you a more complete picture of the physical setup of the problem. Below we will follow a systematic way of applying Newton’s laws.
System: the book.
Identify forces on the system:
As usual, we look for contact forces from objects touching the system and long-distance forces, such as gravity, that do not require contact. The following is the list of the forces acting on the system (the book) here by the Agent, the Earth, and the Table. There are two forces from the table - the normal force and the kinetic friction.
-
Push by an Agent,
-
Weight of the book by Earth,
-
Normal force by the Table, and
-
Kinetic friction by the Table.
We show the forces in Figure 6.55.
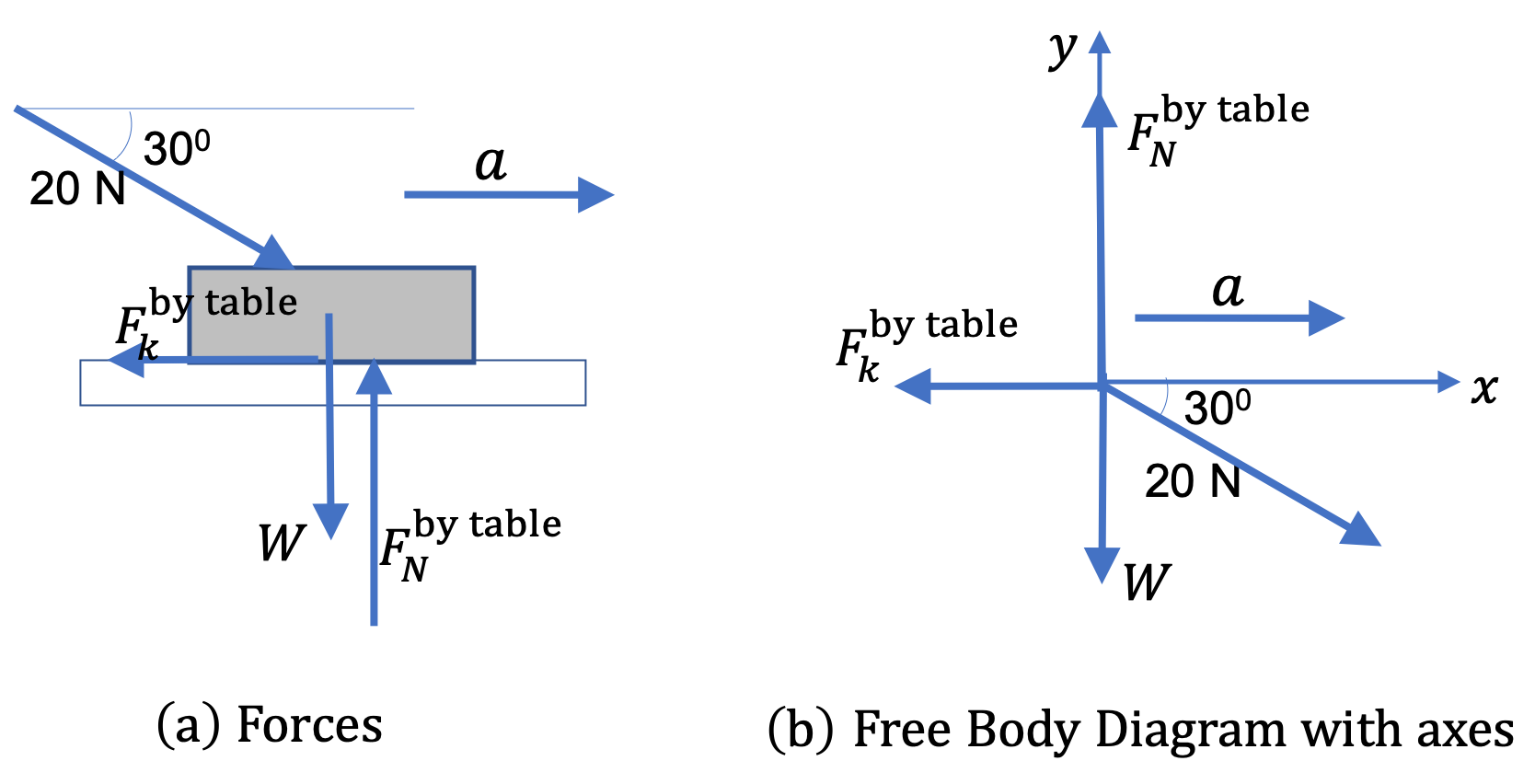
Choose a coordinate system:
Since we expect an axcceleration in the horizontal direction, we pick one of the Cartesian axis, here \(x \) axis, to be in the direction of the accelerations. Let \(a \) be the magnitude of the acceleration, then, the components of the acceleration vector \(\vec a \) is
\begin{equation*}
a_x = a,\ \ a_y = 0.
\end{equation*}
We will use this when we fill in different quantities in the components of the equation of motion.
Generate equations of motion:
Using the Free-body diagram, we can work out the components of forces.
\begin{align*}
\amp \text{Push: } F_x = 20\,\cos\,30^{\circ} = 17.3\text{ N},\ \ F_y = -20\,\sin\,30^{\circ} = -10.0\text{ N},\\
\amp \text{Weight: } W_x = 0,\ \ W_y = - 1.5\times 9.81 = -14.715\text{ N}, \\
\amp \text{Normal from Table: } F_{N,x} = 0,\ \ F_{N,y} = F_N,\\
\amp \text{Kinetic Friction from Table: } F_{k,x} = -F_k,\ \ F_{k,y} = 0,
\end{align*}
where the magnitude \(F_k \) can also be written in terms of the magnitude of the normal force \(F_N \text{.}\)
\begin{equation*}
F_k = \mu_k F_N \Longrightarrow F_k = 0.3\, F_N.
\end{equation*}
Now, we use Cartesian components of forces into the Cartesian components of \(\vec F_{\text{net}} = m\vec a\) to obtain one equation along each axis. We get the following two equations here.
\begin{align*}
\amp 17.3 + 0 + 0 - 0.3\, F_N = 1.5\, a,\\
-\amp 10 - 14.715 + F_N + 0 = 0.
\end{align*}
Solving equations of motion:
Solving equations of motion gives
\begin{equation*}
F_N = 24.715\text{ N},\ \ a= \dfrac{17.3-0.3\times 24.715}{1.5} = 6.59\text{ m/s}^2.
\end{equation*}
Interpret the result:
The acceleration of the book when sliding has magnitude \(6.59\text{ m/s}^2\) in the horizontal direction towards the positive \(x \) axis.
Solution 2. b
b We notice that at the instant the book starts to slide, its velocity is zero. And after that, the acceleration is constant along \(x \) axis. Therefore, we can use the kinematics equations for the constant acceleration along the \(x \) axis. Therefore,
\begin{align*}
\Delta x \amp = v_{i,x}\, t + \dfrac{1}{2}\,a_x\, t^2,\\
\amp = 0 + \dfrac{1}{2}\times 6.59\times 0.5^2 = 1.65\text{ m}.
\end{align*}



