Example 6.128. Rock Tied to String Moving in a Circle.
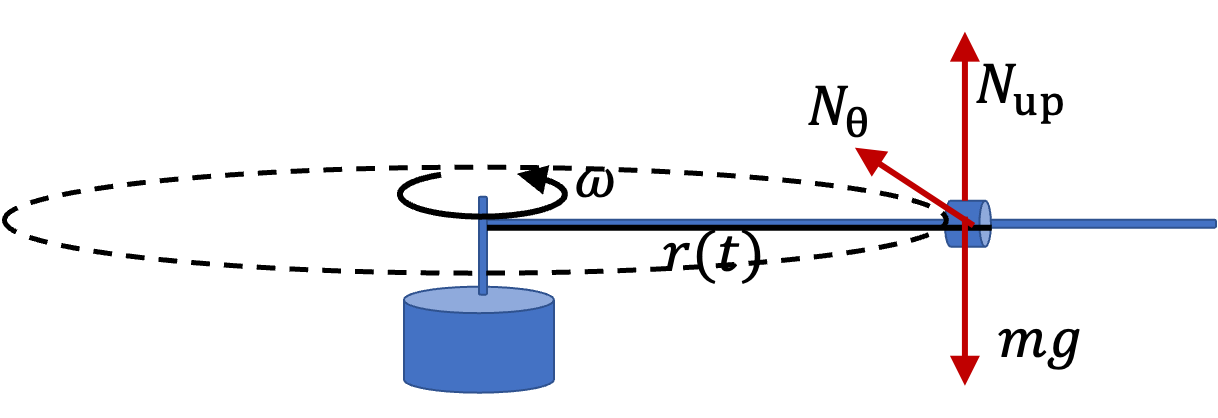
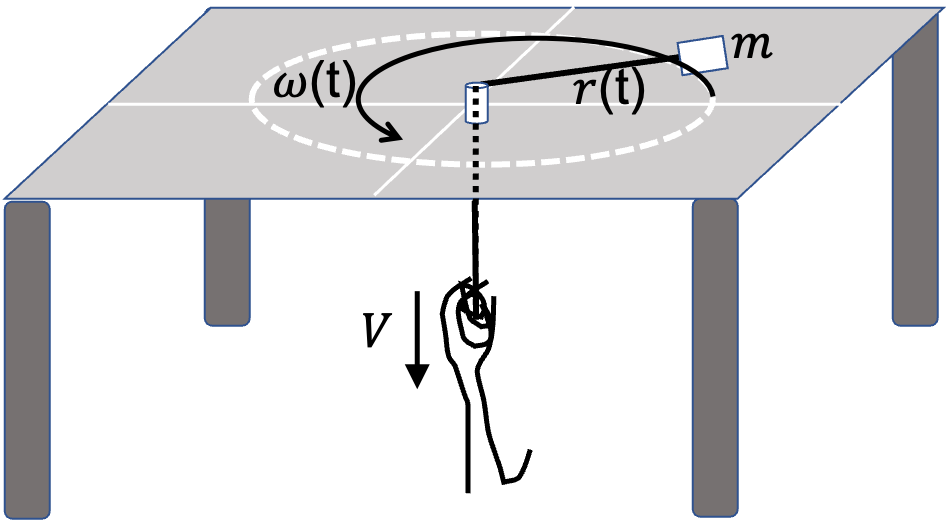
A rock of mass \(0.6\text{ kg}\) is tied to a string and swung overhead in a horizontal uniform circular motion as shown in Figure 6.129.

The length of the string is \(0.8\text{ m}\text{.}\) The string will break if tension in the string exceeds \(96\text{ N}\text{.}\)
(a) Assuming the string to be almost in the horizontal plane, set up polar coordinate equations of motion for the rock for the condition in which the tension is an infinitsimal amount less than the breaking point.
(b) Find position, velocity, and acceleration of the rock as functions of time.
Answer.
Solution 1. a
Let us us polar coordinates with origin at the center of the circle. Let \(a_r(t)\) and \(a_\theta(t)\) be the radial and angular components of acceleration at instant \(t\) and \(F_r(t)\) and \(F_\theta(t)\) be the radial and angular components of net force on the stone. at the same instant. There are two forces on the stone: weight \(mg\) along \(z\) axis and horizontal component of tension \(\vec T\) in the radially inward directions, i.e., in the \((-\hat u_r)\) direction. Therefore, we will have the following equations of motion.
\begin{equation*}
-T = m a_r,\ \ 0 = m a_\theta,\ \ T_z-m g = m a_z=0.
\end{equation*}
We are asssuming that horizontal component of \(\vec T\) has almost the full magnitude and \(a_z=0\text{.}\) Here the acceleration components will have simplified expressions due to the fact that radius of the circle is not changing.
\begin{equation*}
a_r = -R \omega^2,\ \ a_\theta = R\frac{d\omega}{dt},
\end{equation*}
where \(\omega = d\theta/dt\text{.}\) Therefore, we have the following.
\begin{align*}
\amp \omega^2 = \frac{T}{m R}.\\
\amp \frac{d\omega}{dt} = 0.\\
\amp T_z = mg.
\end{align*}
These can be simplified to
\begin{equation}
\omega = \sqrt{\frac{T}{mR}},\ \ \text{constant}.\tag{6.64}
\end{equation}
Numerically, this becomes
\begin{equation}
\omega = \sqrt{\frac{96}{0.6\times 0.8}} = 14.1\text{ rad/sec}.\tag{6.65}
\end{equation}
Solution 2. b
From Eq. (6.64) we get
\begin{equation*}
\omega = \frac{d\theta}{dt} = \sqrt{\frac{T}{mR}} = 14.1.
\end{equation*}
Integrating this we get
\begin{equation*}
\theta(t) = \theta_0 + 14.1\; t.
\end{equation*}
Thus, we have
\begin{align*}
\amp r(t) = 0.8\text{ m},\ \ \theta(t) = \theta_0 + 14.1 t. \\
\amp v_r(t) = 0,\ \ v_\theta = r\omega(t) = 0.8\times 14.1 = 11.3\text{ m/s}. \\
\amp a_r(t) = -r\omega^2 = -160\text{ m/s}^2,\ \ a_\theta = 0.
\end{align*}