Example 9.37. Angular Momentum of a Particle Given its Trajectory and Mass.
Let the position vector of a particle of mass 50 g be the vector \((x=2, y=t^2, z=0)\text{,}\) where \(t\) is in sec and coordinates in m. What is the angular momentum at \(t = 30\) sec?
Solution.
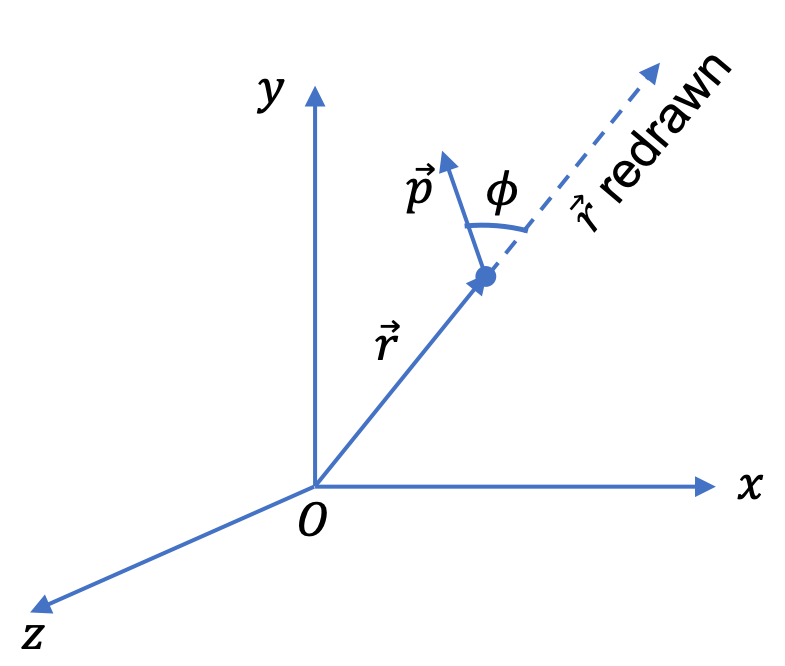
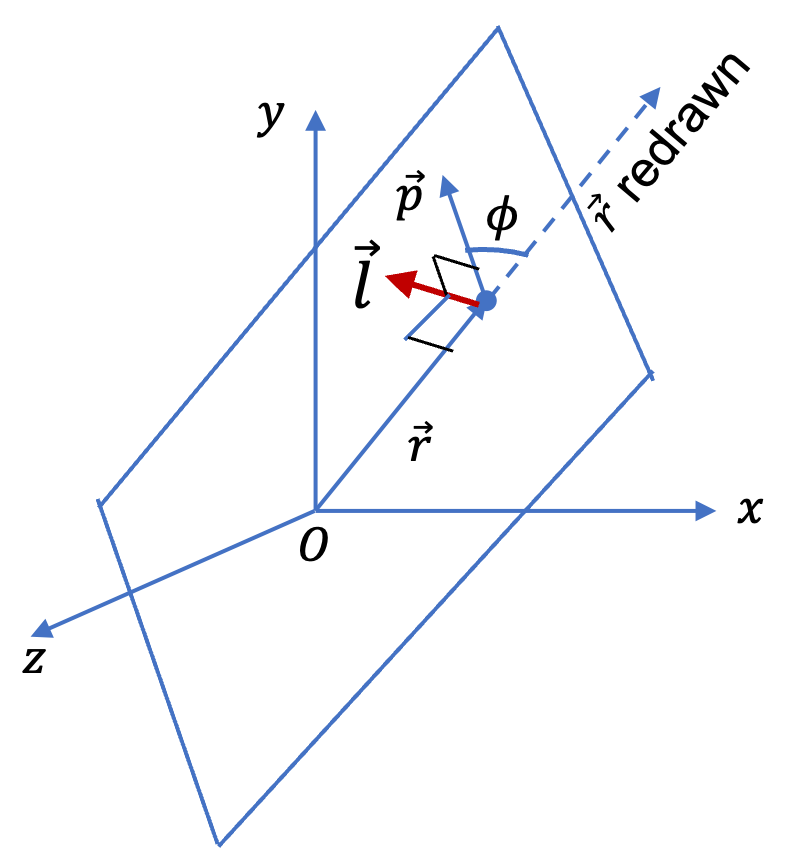
We find the expression for the velocity by taking the derivative of the position: \(\vec v = (0,2 t, 0)\, \text{m/s}\text{.}\) From the definition \(\vec L = \vec r \times \vec p\) we get
\begin{align*}
L \amp = (2\hat u_x + t^2 \hat u_y) \times 0.05(2t\hat u_y)\\
\amp = 0.2t \hat u_z.
\end{align*}