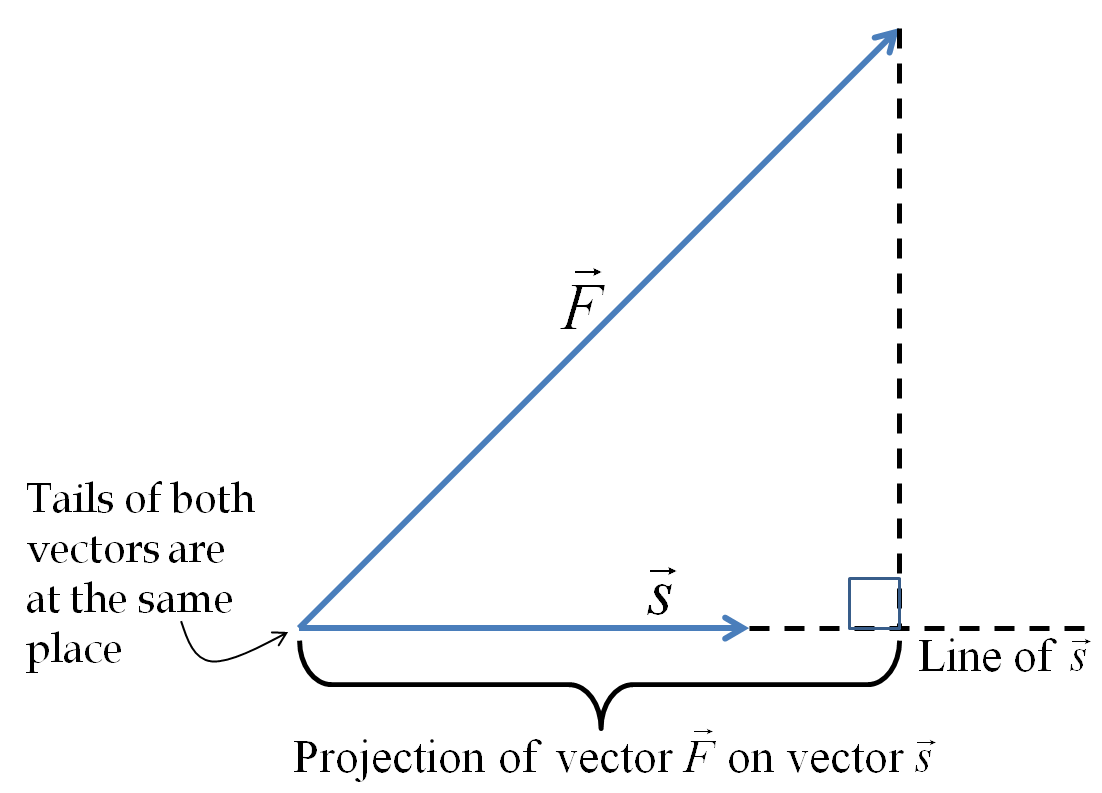
The scalar product of two vectors \(\vec A\) and \(\vec B\) is defined by the product of the magnitude of one these vectors and the projection of the other vector along this vector. It’s denoted by the composite symbol “\(\vec A \cdot \vec B\)”.
\begin{equation}
\vec{A} \cdot \vec{B} = |\vec{A}| \times \text{Projection of }\vec{B}\text{ on }\vec{A} \equiv A B_{\parallel A},\tag{3.3}
\end{equation}
or, equivalently.
\begin{equation}
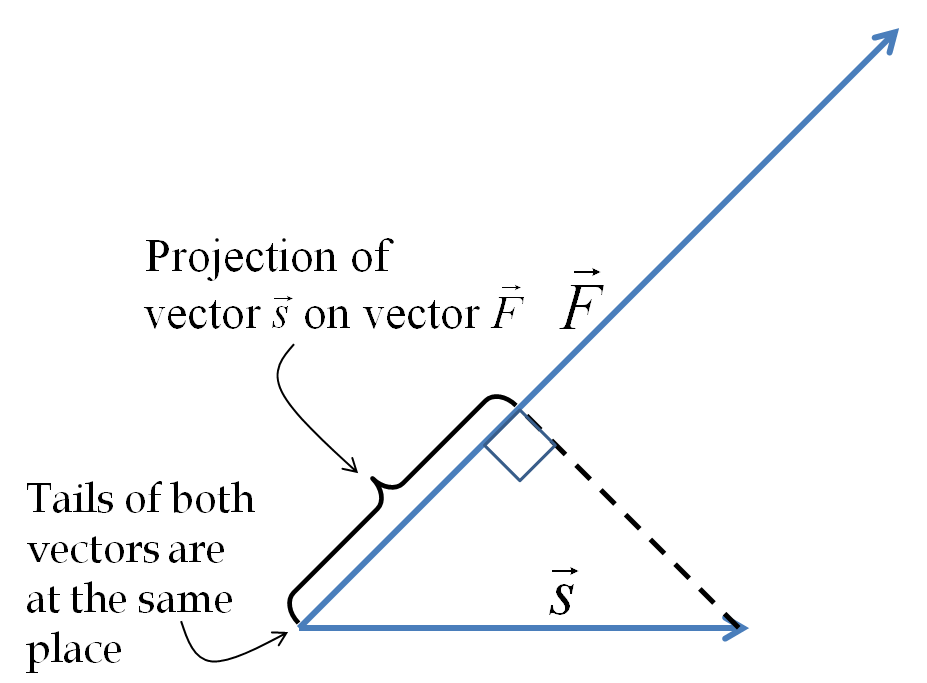
\vec A \cdot \vec B = |\vec B| \times \text{Projection of }\vec A\text{ on }\vec B \equiv B A_{\parallel B}.\tag{3.4}
\end{equation}
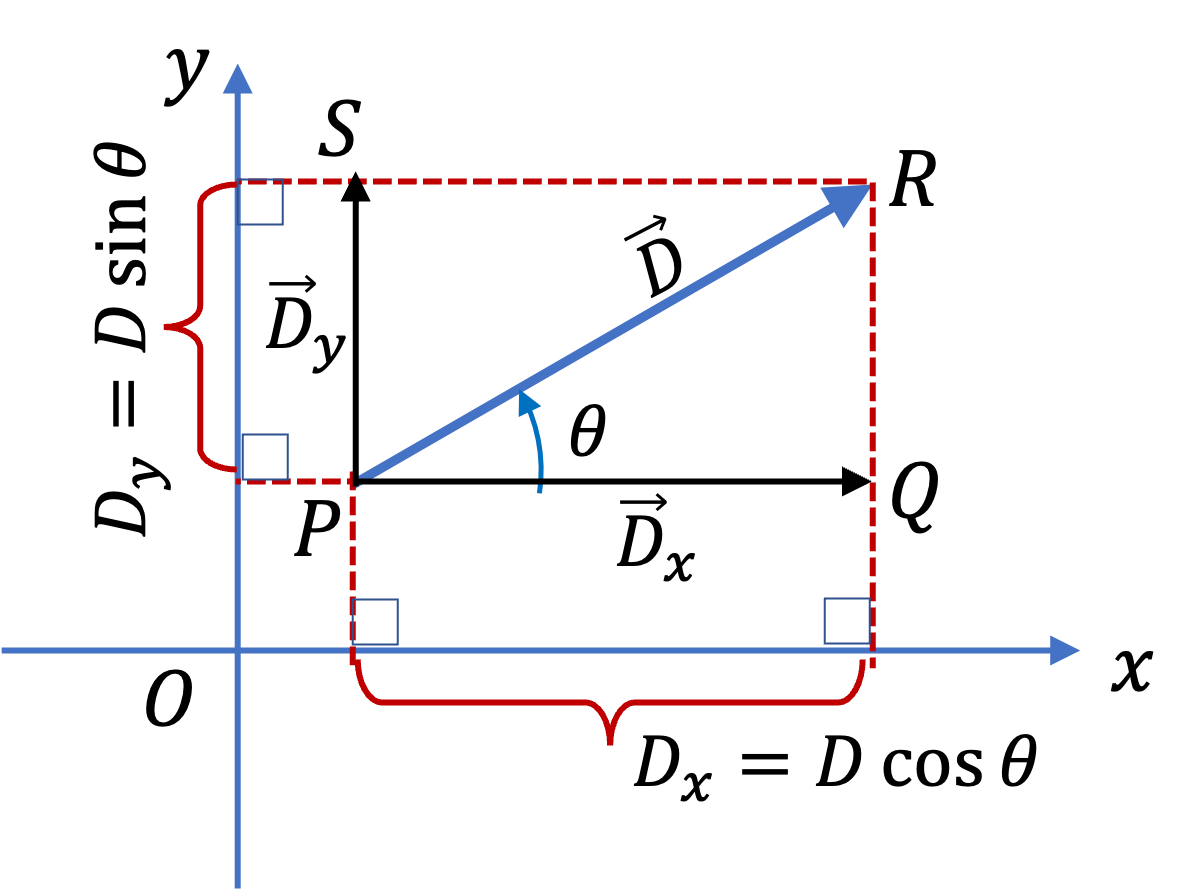
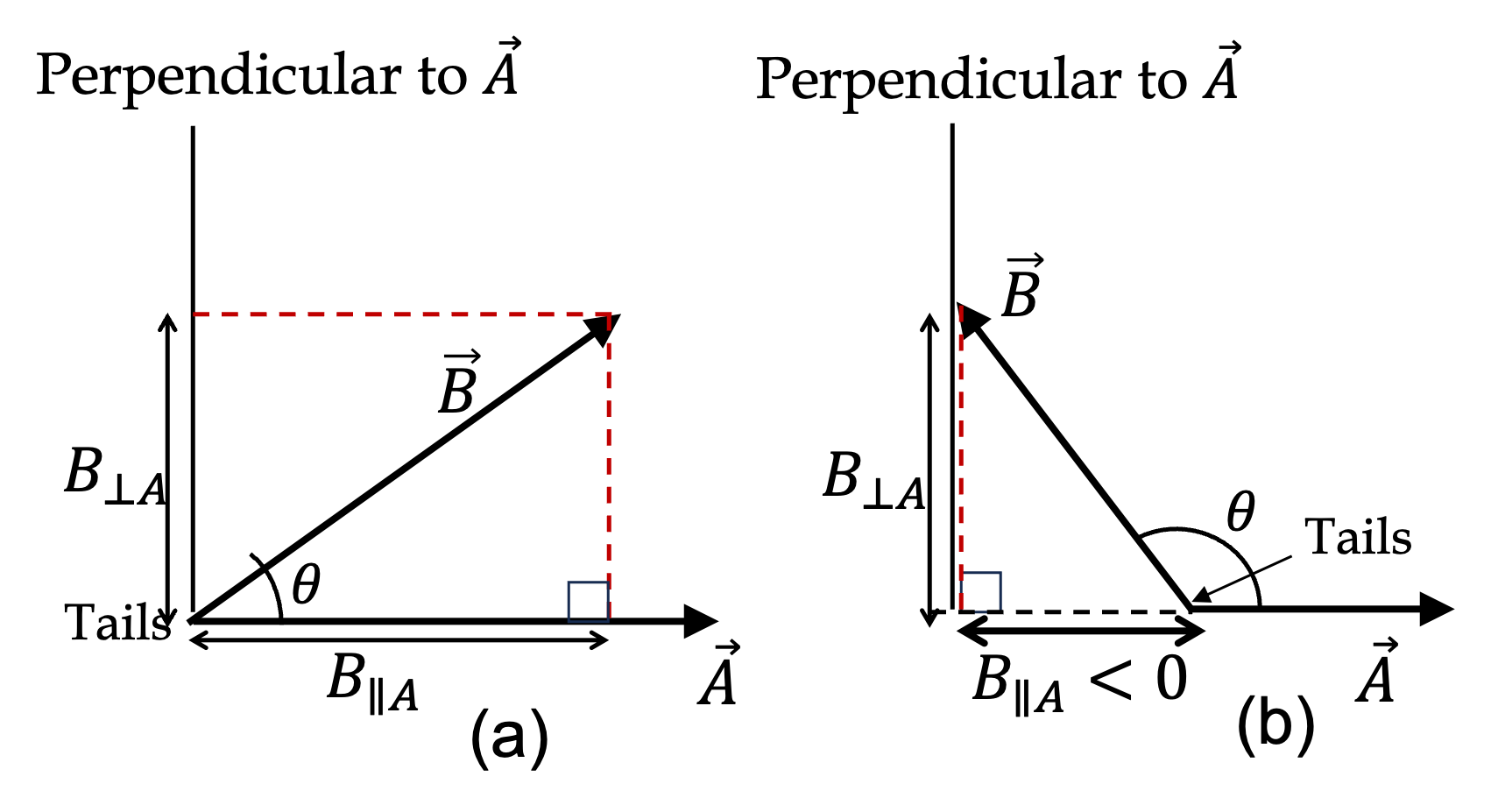
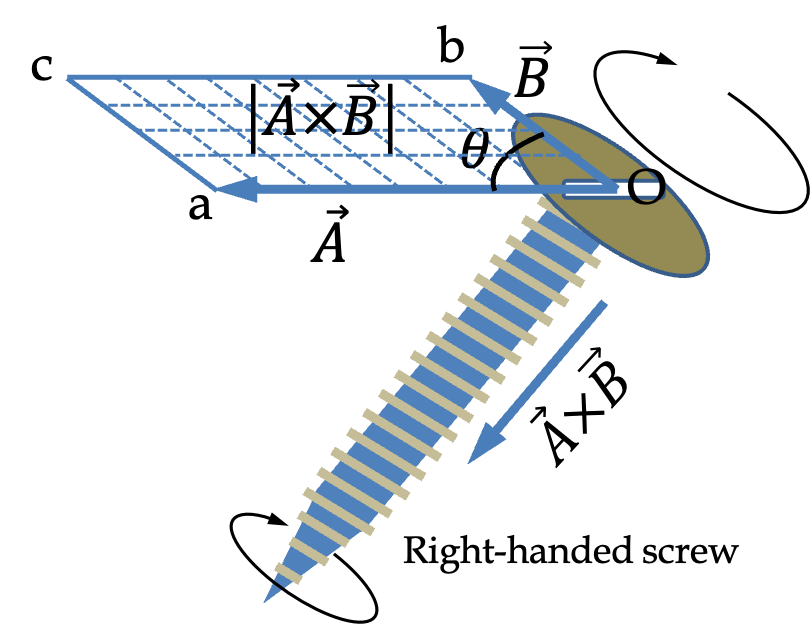
Refering to
Figure 3.14, we see that we can use trigonometry of right-angled triangle to write the projection of
\(\vec B\) on
\(\vec A\) in terms of the angle
\(\theta\text{.}\)
\begin{equation}
B_{\parallel A} = B\,\cos\theta.\tag{3.5}
\end{equation}
This formula covers both the positive and negative projections since \(\cos\theta\) is negative for \(90^\circ \lt \theta \lt 270^\circ\text{.}\) Therefore, we can also write the following for the scalar product.
\begin{equation}
\vec A \cdot \vec B = A B\cos\theta.\tag{3.6}
\end{equation}
Note that if the dot product between two vectors is zero, then, either one or both of the vectors has a zero length, or the angle between them in ninety degrees since \(\cos 90^{\circ} = 0\text{.}\)
\begin{equation*}
\boxed{\text{If}\ \vec A\cdot \vec B = 0, \text{ then, either }|\vec A| = 0, \text{ or } |\vec B| = 0, \text{ or }\theta = 90^{\circ}.}
\end{equation*}
Another useful property of the scalar product occurs when you take the scalar product of a vector with itself. Since \(\cos\theta = 1\) here, or equivalently, the projection of a vector on itself will be the entire magnitude of the vector, the scalar product is equal to the square of the magnitude of the vector.
\begin{equation*}
\vec A\cdot\vec A = |\vec A|^2.
\end{equation*}