Example 6.12. Resultant force.
A box is pulled by a force of \(40\) N in the horizontal direction and a force of \(30\) N also horizontally but at an angle of \(90^{\circ}\) to the direction of the other force. Find the magnitude and direction of the resultant force.
Solution.
This problem can be done in a number of ways. Here we will illustrate two most commonly used methods
-
Geometrical method. Place the second force at the tip of the first force as in Figure 6.13. Then the force from the tail of the first force to the tip of the second force is the resultant force. In the graphical method of addition, we use deduce the magnitude of the force by a scale for the drawing and use protractor to read off the angle. The scale on the drawing gives the magnitude of the force to be \(50\) N. A protractor gives the approximate angle of \(35^{\circ}\) vector \(\vec F\) makes with the horizontal direction. Note that it is impossible to read the angle with \(100\%\) precision and we will obtain only an approximate value for the angle when using the graphical method.
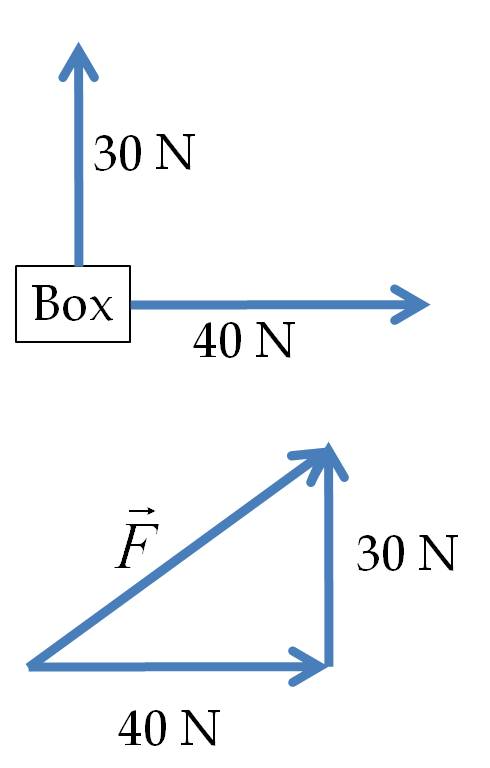
Figure 6.13. Graphical addition of forces. -
Analytical Method.First, we choose Cartesian axes and figure out the Cartesian components of the given forces. The components are easy to figure out if you place origin of the coordinate system at the tails of the forces as shown inFigure 6.14. Then, we add the \(x\) components of the forces separately from their \(y\) and \(z\)-components to obtain the \(x\text{,}\) \(y\) and \(z\)-components of the resultant force.
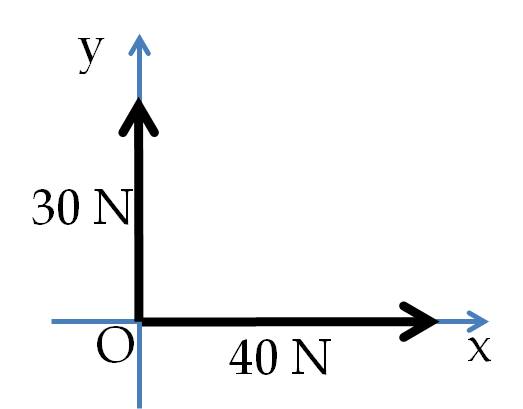
Figure 6.14. The magnitude and direction of the resultant force are then calculated from its Cartesian components. In the present situation, we have the \(z\)-components all zero since the given forces fall in one plane. Therefore, we have only the \(x\) and \(y\)-components to work with. A table usually helps in organizing these calculations as shown below.Force \(x\)-comp (N) \(y\)-comp (N) \(z\)-comp (N) \(\vec F_1\) 40 0 0 \(\vec F_2\) 0 30 0 Resultant, \(\vec F\) 40 30 0 Therefore, the magnitude of the force is\begin{equation*} F = \sqrt{F_x^2+F_y^2}=\sqrt{40^2+30^2} = 50\ \textrm{N}, \end{equation*}and the direction given as the angle from the positive \(x\)-axis is\begin{equation*} \theta =\arctan\left(\frac{F_y}{F_x}\right)=\arctan\left(\frac{30}{40}\right) = 37^{\circ}, \end{equation*}which is in general agreement with the result from the geometrical method given (a) above. It is clear that the geometrical approach gives the sum vector directly, while if you follow the analytic approach, you will get components from which you need to construct the magnitude and direction. Most of the time we will work using the analytic approach since it is usually easier to do and does not require us to draw vectors to scale.