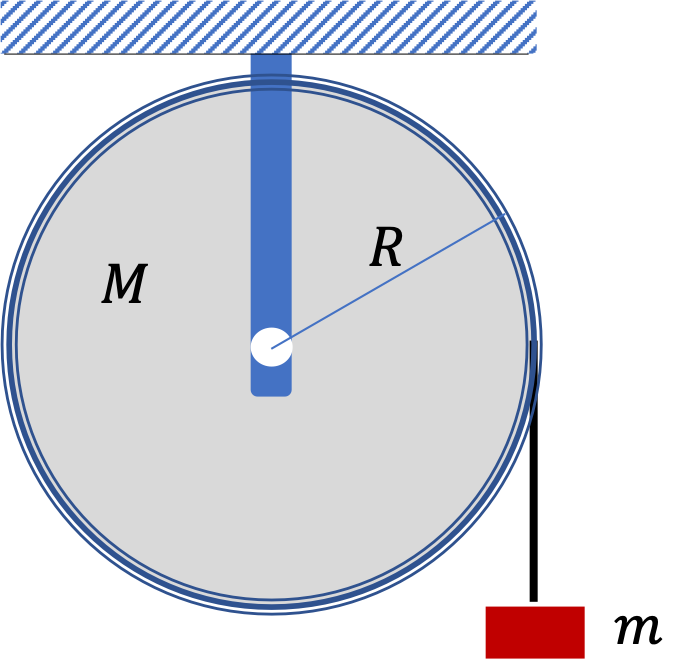
Example 9.97. Angular Acceleration of a Pulley.
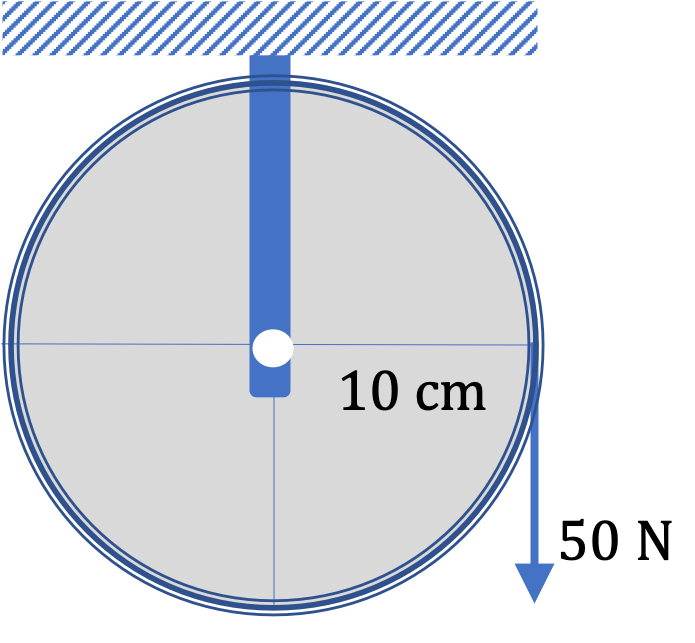
(c) Is the rotating body a rigid body? (d) What will be the angular acceleration of the pulley when the force in the rope is \(50\text{ N}\) down as shown in the figure.
Answer.
Solution 1. a
Solution 3. c
Solution 4. d
Magnitude:
Since we have a rigid body rotating about a fixed axis, we can use
\begin{equation*}
I\alpha = \mathcal{T}_{\text{net}}.
\end{equation*}
Here, \(I \) is the moment of inertia of the pulley, which we can consider to be a disk.
\begin{equation*}
I = \dfrac{1}{2}\, MR^2.
\end{equation*}
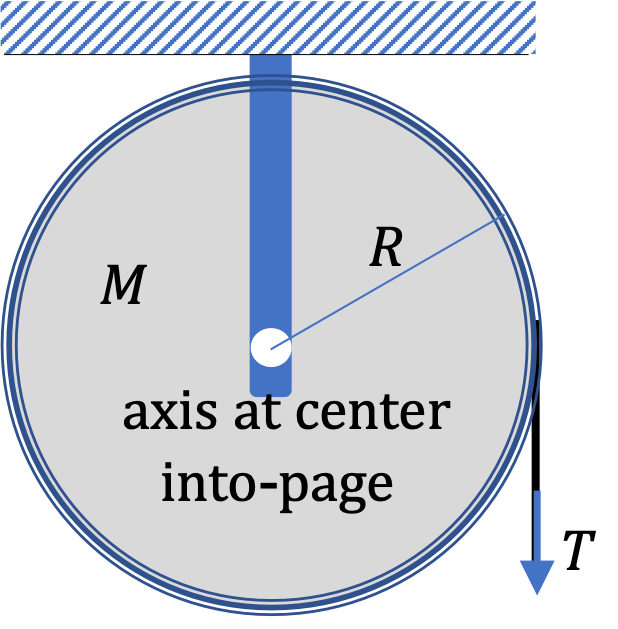
By drawing a diagram, you can convince yourself that the lever arm of the tension force is just the radius of the pully. Therefore
\begin{equation*}
\mathcal{T}_{T} = R T.
\end{equation*}
Lines of other forces on the pulley pass through the axis, therefore, their lever arms are zero. This gives us the net toque to be
\begin{equation*}
\mathcal{T}_{\text{net}} = RT.
\end{equation*}
Therefore, the angular acceleration is
\begin{equation*}
\alpha = \dfrac{\mathcal{T}_{\text{net}}}{I} = \dfrac{ 2T}{MR} = \dfrac{ 2\times 50}{20\times 0.10} = 50\text{ rad/sec}^2.
\end{equation*}
Direction:
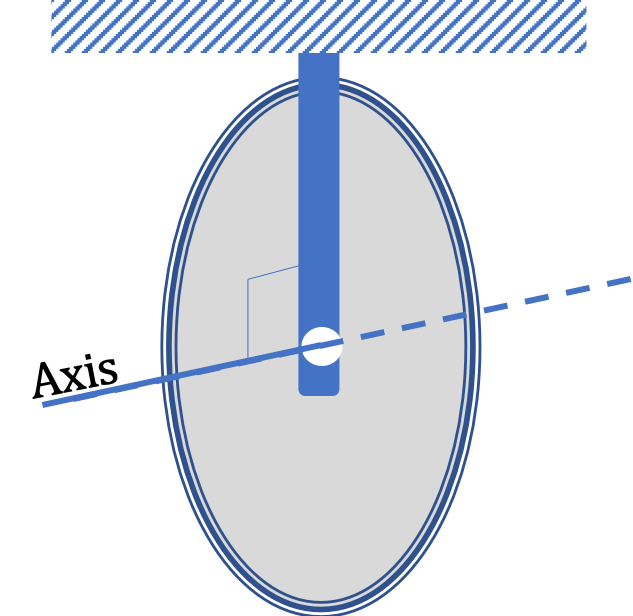
The direction of the net torque is into-the-page, which is the same as negative \(z \) axis or the clockwise rotation. This is the same direction for the angular acceleration.